




















SFH-50 Quick Start Guide
30
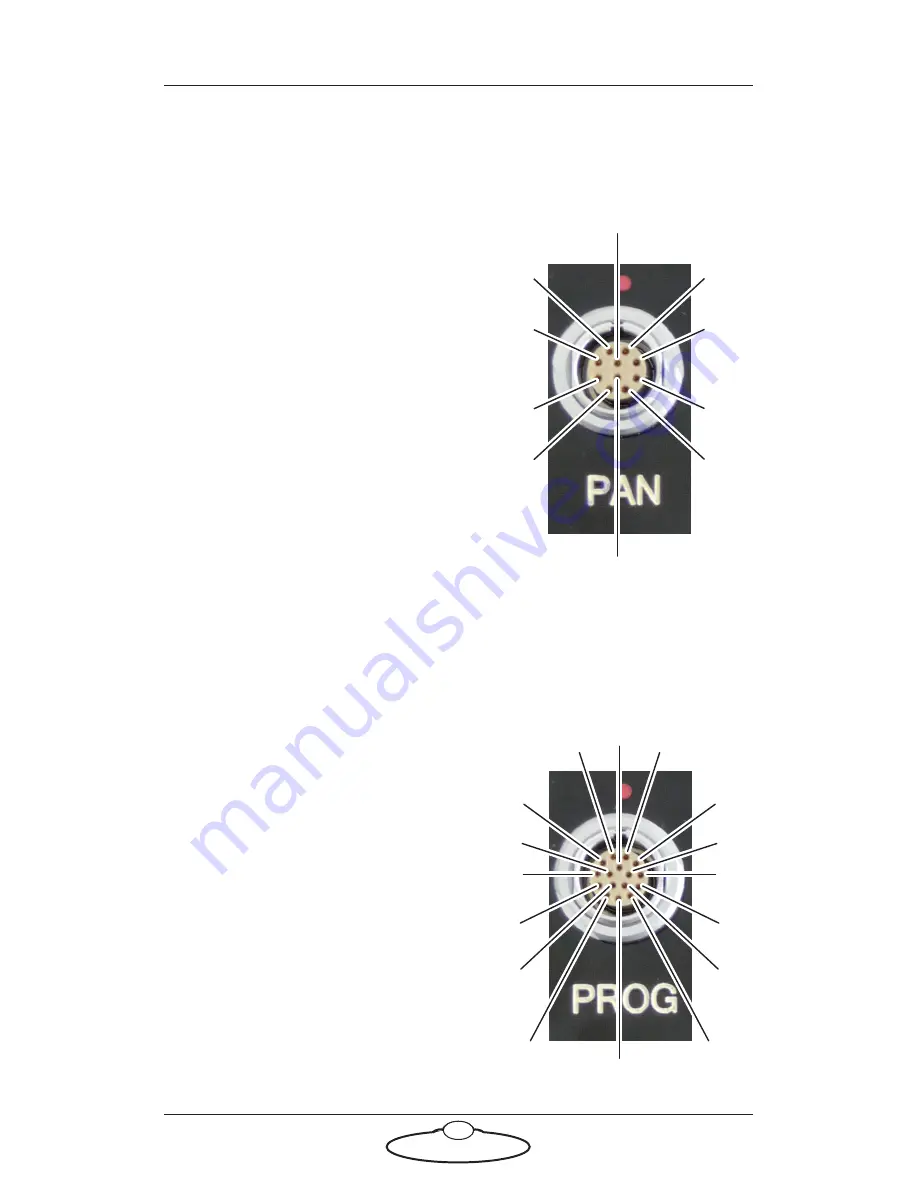
Ulti-box connector pin-out information
Servo motor connector
This type of connector is used for six
servo motor connectors on the Ulti-box:
Pan, Zoom, Focus, Tilt, Aux-1, Aux-2.
1.
DATUM
2.
A+
3.
B+
4.
Z+
5.
N/C
6.
MOTOR_B
7.
MOTOR_A
8.
LIMIT
9.
+5V
10. GND
Program serial connector
Serial connector for connection to a controller using a
Serial RS232
connection, and for updating the firmware in the Ulti-box.
1.
SerialTxA
2.
SerialRxA
3.
+5V
4.
FGPIO
5.
DSP_TRSTN
6.
TCK
7.
TMS
8.
DSP_TDI
9.
DSP_TDO
10. DSP_EMU0
11. DSP_EMU1
12. FPGA_TDI
13. FPGA_TDO
14. BOOT_SEL
15. +3.3V
16. GND
2
1
4
3
7
8
5
6
9
10
1
2
3
4
5
7
15
8
9
10
11
13
6
16
12
14
Содержание SFH-50
Страница 1: ...Quick Start Guide Document version SFH50 QSG 20150811 Part number MRMC 1166 00 SFH 50 HEAD ...
Страница 4: ...SFH 50 Quick Start Guide iv Appendix 3 Specifications 33 ...
Страница 10: ...SFH 50 Quick Start Guide 6 SFH 50 with Roll Ring Mounting rods LCM Zoom LCM Focus ...
Страница 38: ...SFH 50 Quick Start Guide 34 SFH 50 with Roll Ring 130 53 25 25 40 192 25 25 27 25 max 305 480 455 ...
Страница 39: ...SFH 50 Quick Start Guide 35 188 215 116 Roll Ring inner diameter Platform width Roll Ring platform length ...







































































