





























Bolt X Quick Start Guide
18
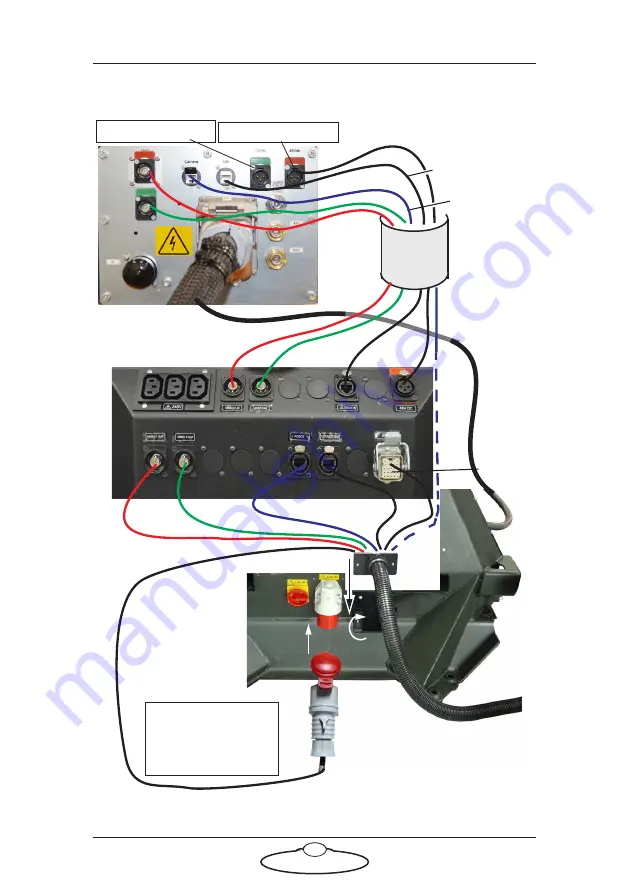
Connecting the cables — Bolt X On Track
Cable
wrap
VIDEO 1
VIDEO 2
VIDEO 1
ETHERNE
T
VIDEO 2
ULTI ETH
415 Volt
for C
amer
a
E-STOP
ULTI OUT
ROBOT
ETHERNET for
camera
Power Supply:
415 Volt, 3-phase,
5-wire including
Neutral and Ground
VIDEO 1
VIDEO 2
ETHERNE
T
for Ulti
48V OUT
Power for Ulti box
Power for Camera
YRC1000 Robot
Controller
Содержание Bolt X
Страница 1: ...Bolt X Quick Start Guide QSG Product Code MRMC 2253 00 Products Covered MRMC 2023 00 MRMC 2080 00...
Страница 17: ...Bolt X Quick Start Guide 13 Notes...
Страница 43: ...Bolt X Quick Start Guide 39 Notes...
Страница 56: ...Bolt X Quick Start Guide 52 Notes...
Страница 61: ...Bolt X Quick Start Guide 57 Notes...
Страница 62: ...Bolt X Quick Start Guide 58 Notes...
Страница 65: ...Bolt X Quick Start Guide 61 Notes...
Страница 66: ...Bolt X Quick Start Guide 62 Notes...
Страница 67: ...Bolt X Quick Start Guide 63 Notes...







































































