





























Software Design
State Diagram
DRM028 — Rev 0
Designer Reference Manual
MOTOROLA
Software Design
89
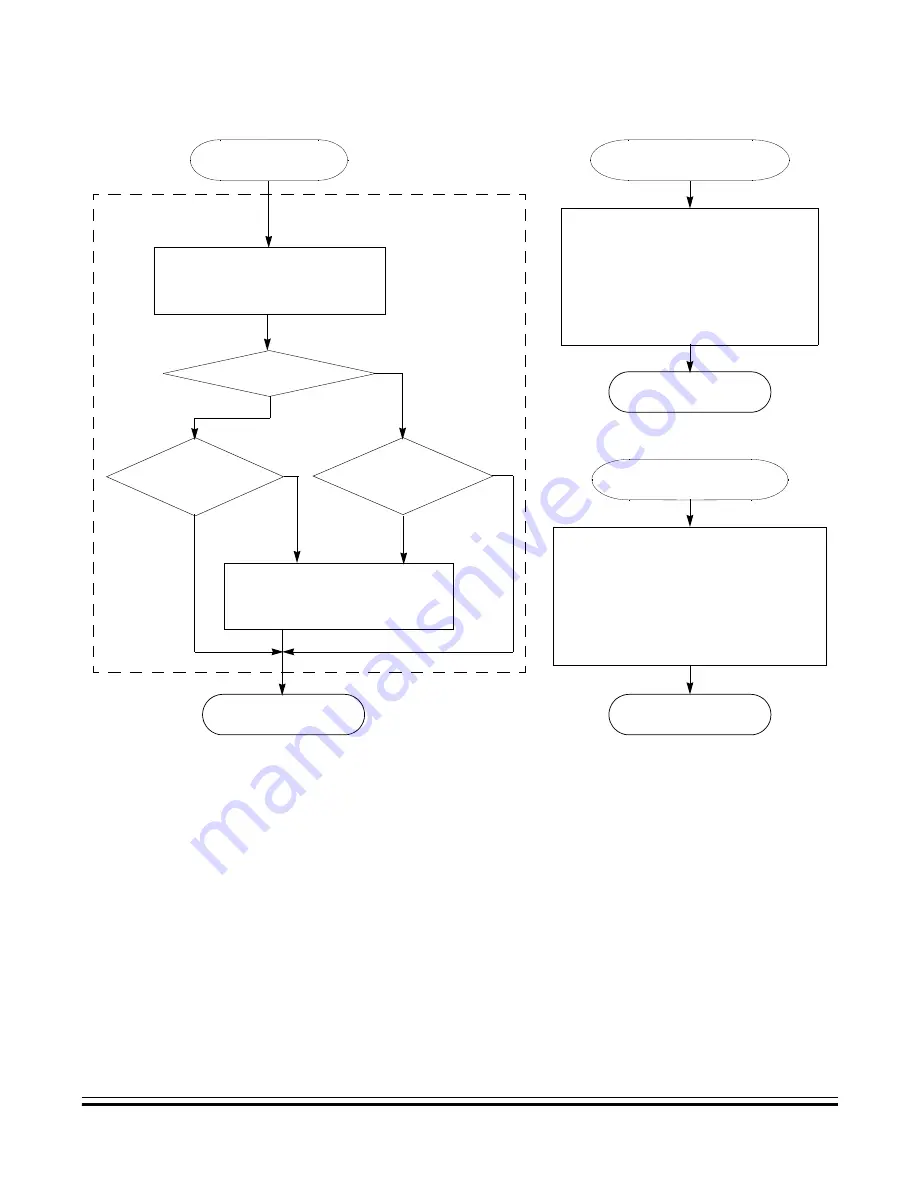
Figure 5-6. Software Flowchart — Interrupts
5.5 State Diagram
The motor control application can be in one of the eight states shown in
Figure 5-7
. Each of these states is described in the subsections
following the figure.
INTERRUPT
PWM RELOAD
BEMF ZERO CROSSING
RTI
INTERRUPT
TIMER 1 (TIM A CH1)
CURRENT MEASUREMENT ISR:
RTI
SENSE ZERO CROSSING INPUT:
– TAKE 3 ZC INPUT SAMPLES
– BEMF STATE = S1&S2 | S2&S3
BEMF state
0
1
V_TASC = ris. edge
YES
NO
V_TASC = fal. edge
YES
NO
SET ZERO CROSSING GET:
– SET
ICR_F
- ZERO CROS. GET
– T_ZCROS = TIMER2 TIME
– START ADC DC-BUS CURRENT CHANNEL
– SERVE VIRTUAL TIMER3
–
CURR
= VALUE FROM ADC
– IF
CURR
>
CURR_MAX_FAULT
:
SET
OVC_F
(OVERCUR.) FLAG
– SET NEXT ADC CHANNEL
NXT_CHNL
INTERRUPT
TIMER 2 (TIM A CH3)
COMMUTATION ISR:
RTI
– IF CMTE_F (COMMUTATION ENABLED):
DO MOTOR COMMUTATION STEP
TIMER 1 CURRENT SENSING TO
PWM SYNCHRONIZATION
SET
PC_F
(PHASE COMMUTATED)
T_CMT
= TIMER 2 ACTUAL TIME
– ZERO CROSSING SELECTION
SENSING ISR:
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..







































































