





























BLDC Motor Control
Used Control Technique
DRM028 — Rev 0
Designer Reference Manual
MOTOROLA
BLDC Motor Control
49
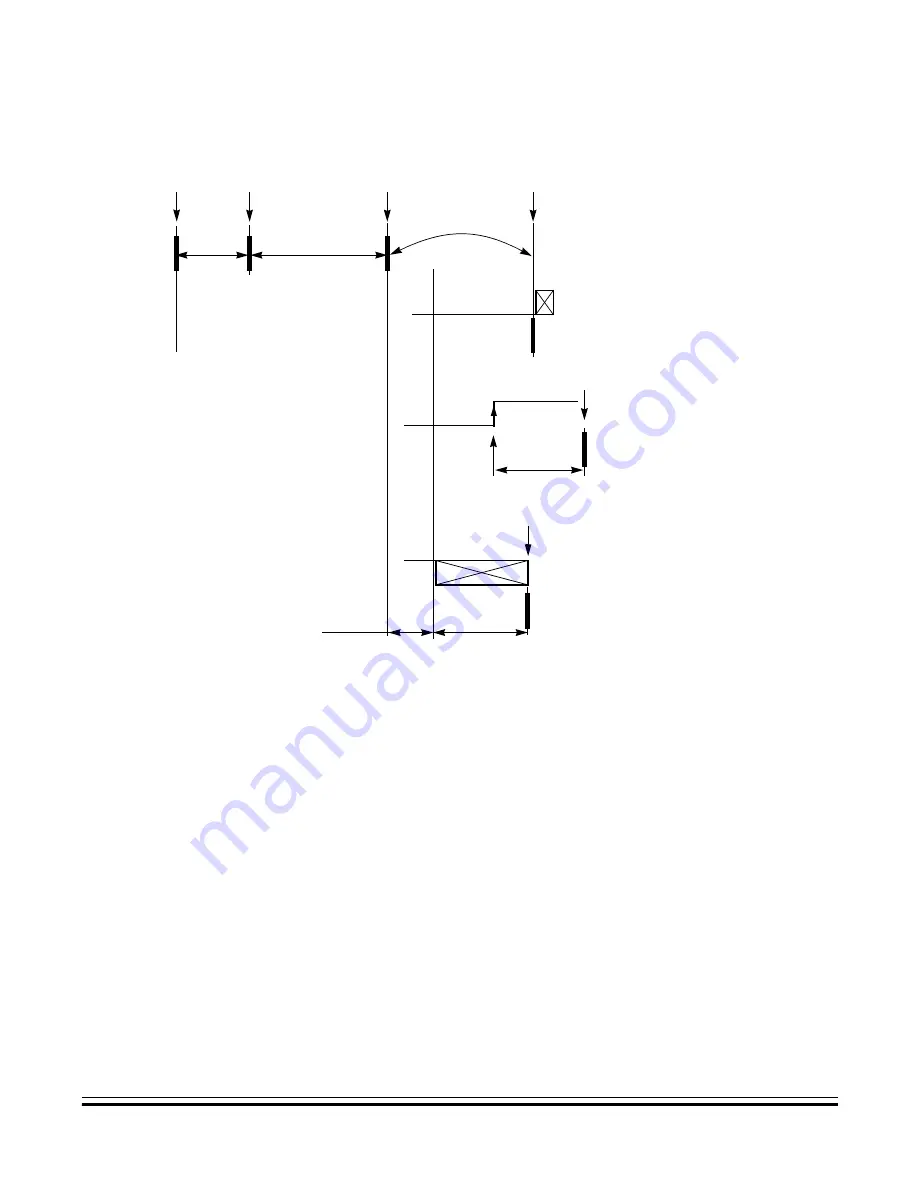
Figure 3-20. Calculation of the Commutation Times During the Starting
(Back-EMF Acquisition) State
3.3.1.5 Starting — Commutation Time Calculation
Even the sub-states of the commutation process in the starting
(back-EMF acquisition) state remain the same as in the running state.
The required commutation timing depends on application state (starting
state, running state). So the commutation time calculation is the same as
that described in
Running — Commutation Time Calculation
, but the following
computation coefficients are different:
coefficient
Coef_HlfCmt
= 0.125 with advanced angle
Advance_angle: 60Deg*3/8 = 22.5Deg
at Starting state!
Per_CmtStart
2*
Per_CmtStart
Per_Toff[n]
T_ZCros[0]
T_ZCros[n]
n=1
n=2
n=3
T_Cmt
[1]
T_Cmt
[2]
T_Cmt
[3]
T2[1]
T2[2]
T2[n]
T2*[n]
COMMUTATION IS PRESET
T2**[n]
Per_HlfCmt[n]
Per_HlfCmt[n]
2*Per_ZCrosFlt[n-1]
ZERO CROSSING
DETECTION SIGNAL
ZERO CROSSING
DETECTION SIGNAL
ZERO CROSSING
DETECTION SIGNAL
COMMUTATED AT PRESENT TIME
NO BACK-EMF FEEDBACK WAS RECEIVED
CORRECTIVE CALCULATION 1
COMMUTED WHEN CORRECT
BACK-EMF FEEDBACK
RECEIVED AND EVALUATED
COMMUTATED WHEN BACK-EMF
ZERO CROSSING IS MISSED
CORRECTIVE CALCULATION 2.
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..







































































