





























4 - 17
4. OPERATION AND FUNCTIONS
4.4 Functions
4.4.1 Full closed control error detection
If full closed control becomes instable for some reason, the speed at servo motor end may increase
abnormally.
The full closed control error detection function is a protective function designed to pre-detect it and stop
operation.
The full closed control error detection function has two different detection methods, speed difference and
position difference, and errors are detected only when the corresponding functions are made valid by
setting Full closed selection (parameter No. 62).
The detection level setting can be changed using the parameters (No. 63, 64).
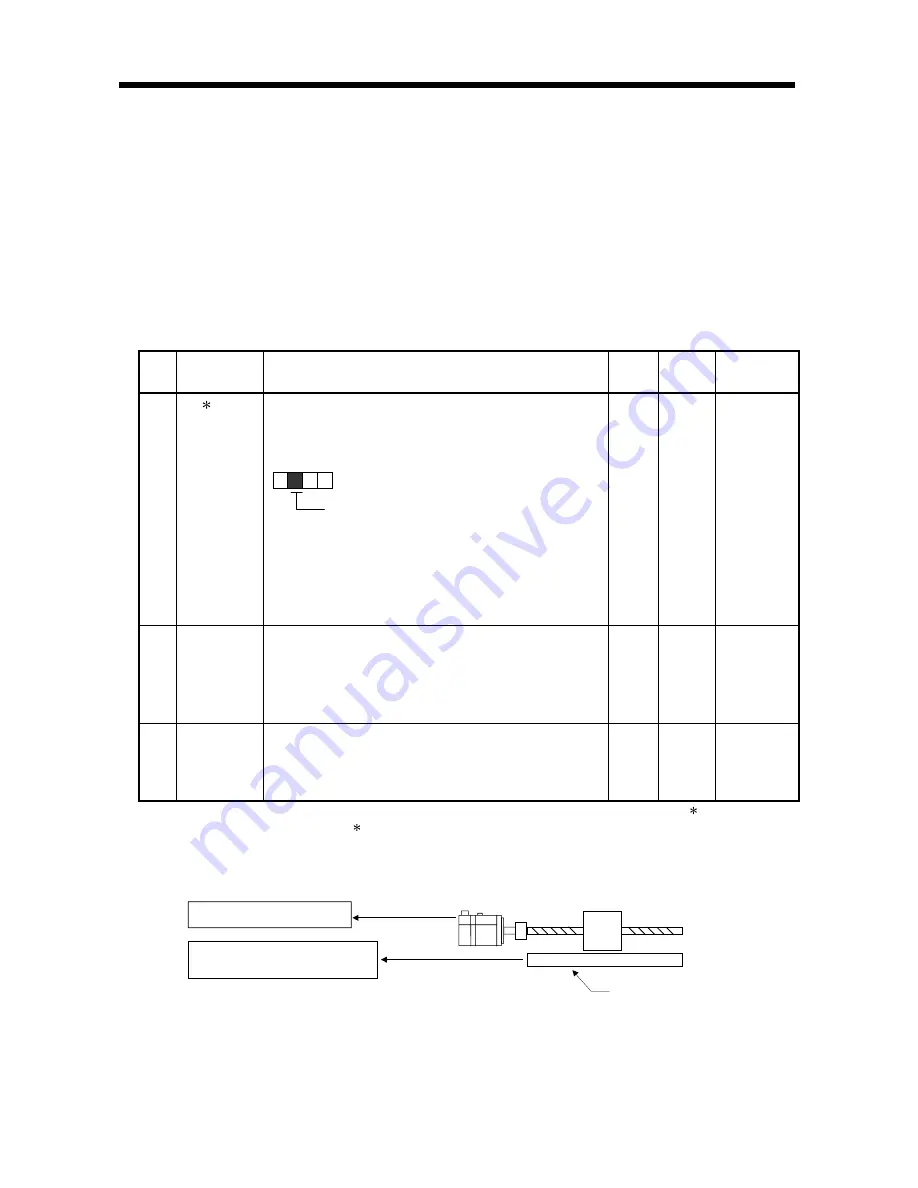
(1) Parameters
No.
Abbreviation
Name and Function
Initial
Value
Unit
Setting
Range
62
FCT
Full closed selection:
Select the full closed encoder direction, full closed
control error detection function 1 and full closed control
error detection function 2.
Full closed control error detection function
0: Invalid
1: Full closed control error detection
function 1 valid
2: Full closed control error detection
function 2 valid
3: Full closed control error detection
functions 1 and 2 both valid
1300
0000h
to
1312h
63
BC1
Full closed control error detection 1
Set the speed difference error detection level of Full
closed control error detection 1.
Whether this function is valid or invalid can be selected
using parameter No. 62 (FCT).
1 to permissible speed
400
r/min
1
to
permissible
speed
64
BC2
Full closed control error detection 2
Set the position difference error detection level of Full
closed control error detection 2.
Whether this function is valid or invalid can be selected
using parameter No. 62 (FCT).
10
0.1rev
1
to
2000
Note 1. When changing the setting of the above parameter, set "000F" in parameter No. 40 "parameter block ( BLK)".
2. After setting the parameter marked , switch power off once. The setting is made valid by switching power on again.
(2) Linear servo control error detection function
Example of linear
scale
Servo motor
1) Motor end F/B speed (r/min)
2) Motor end F/B position (pulse)
3) Full closed end F/B speed (r/min)
4) Full closed end F/B position (pulse)
(Motor end equivalent value)
Содержание Melservo-J2-SUPER series
Страница 19: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO...
Страница 49: ...2 30 2 LINEAR SCALES MEMO...
Страница 85: ...5 8 5 PARAMETERS MEMO...
Страница 89: ...7 2 7 OPTIONS AND AUXILIARY EQUIPMENT MEMO...







































































