





























4 - 15
4. OPERATION AND FUNCTIONS
4.3 Operation from controller
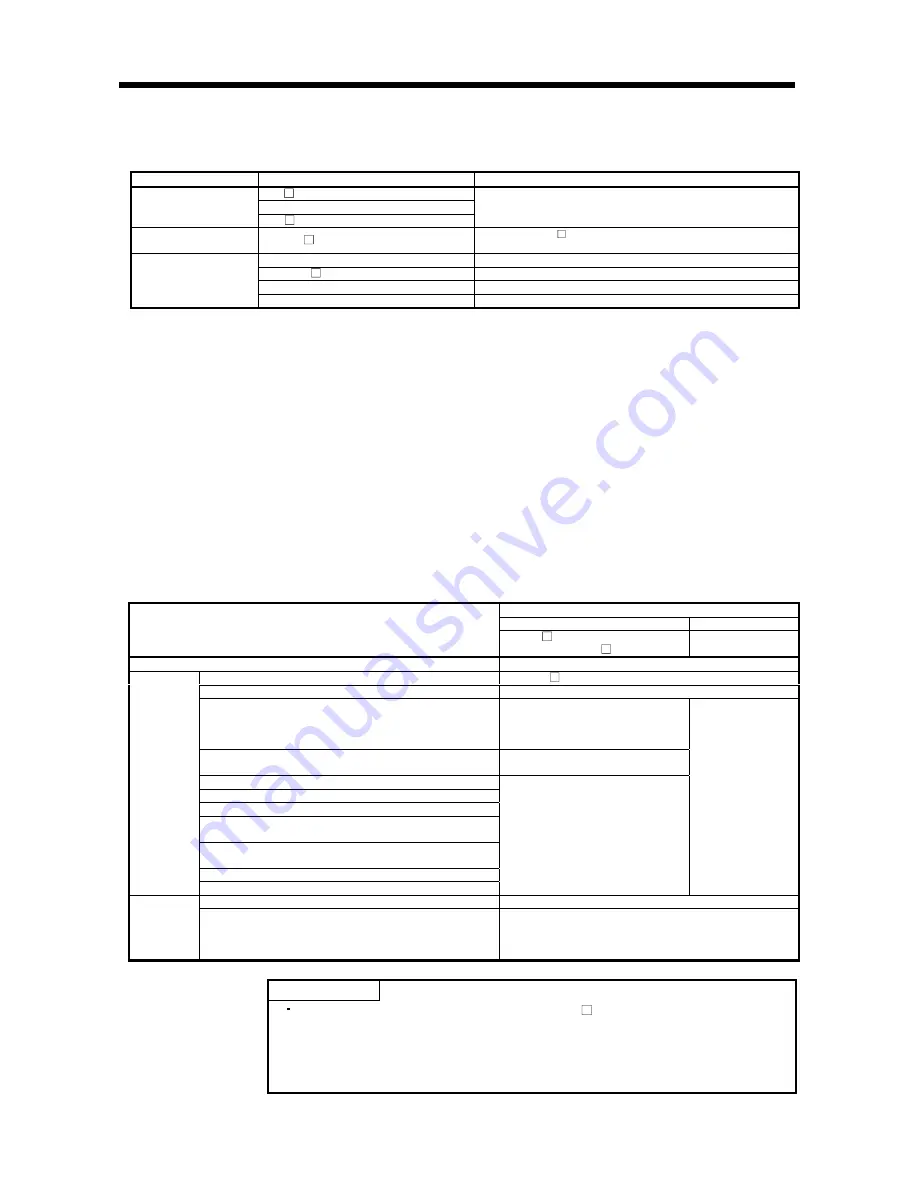
The full closed control compatible amplifier can be used with any of the following controllers.
Classification
Model
Remarks
A17 SHCPU, A173UHCPU
A273UHCPU (-S3)
Motion controller
Q17 CPU
Speed control (II) instructions (VVF, VVR) cannot be used.
Positioning module
QD75M
AD(A1SD)75M cannot be used.
Home position return must be made with care.
MR-MC10 (PCI bus compatible)
MR-MC2 (CPCI bus compatible)
MR-MC30 (ISA bus compatible)
Position Board
MR-MC01 (VME bus compatible)
Home position return must be made with care.
Note. An ABS type linear scale is required to configure an absolute position system.
The battery (MR-BAT) need not be fitted to the servo amplifier.
4.3.1 Operation from controller
Positioning operation from the controller is basically performed like the standard model servo.
However, some parameter settings and home position return operation change depending on the
controller type.
4.3.2 Controller setting
When using full closed control, make the following setting.
Set the other servo parameters and control parameters as in the standard servo.
(1) Motion controller, positioning module
After writing parameter No. 23, 33, 62, 65, 66, and 68 to the servo amplifier, turn off the power supply
and then on again to make the setting valid. (For motion controller, resetting makes the servo
amplifier setting valid.)
Settings
Motion controller
Positioning module
Setting Item
A17 SH, A173UH, A273UH
Q17
QD75M
Command resolution
Motor encoder resolution unit
Amplifier setting
MR-J2S- B
Motor setting
Automatic setting
Serial encoder cable selection
(parameter No. 23)
Setting is necessary only when a 4
wire type linear scale is used.
Contact your sales representative
for the setting method.
Home position setting condition selection
(parameter No. 33)
Contact your sales representative
for the setting method.
Full closed selection (parameter No. 62)
Full closed control error detection 1 (parameter No. 63)
Full closed control error detection 2 (parameter No. 64)
Full closed electronic gear numerator
(parameter No. 65)
Full closed electronic gear denominator
(parameter No. 66)
Dual F/B filter (parameter No. 67)
Servo
parameters
Full closed selection 2 (parameter No. 68)
Set using
MR Configurator.
Set using sequence
ladder.
Unit setting
mm/inch/degree/pulse
Positioning
control
parameters
Moving distance per pulse (AP, AL, AM)
Number of pulses per revolution (AP)
Moving distance per revolution (AL)
Unit multiplying factor (AM)
Set AP, AL and AM as usual with motor encoder
resolution.
SUPPLEMENT
In the future, the Q motion controller (Q17 ) is scheduled to allow the
servo parameter Pr. 40 to Pr. 75 settings to be changed from the
peripheral software.
Contact your sales representative for the modification time and
compatible versions.
Содержание Melservo-J2-SUPER series
Страница 19: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO...
Страница 49: ...2 30 2 LINEAR SCALES MEMO...
Страница 85: ...5 8 5 PARAMETERS MEMO...
Страница 89: ...7 2 7 OPTIONS AND AUXILIARY EQUIPMENT MEMO...







































































