





























14 Homing Mode Objects
14.4 [Homing acceleration (Obj. 609Ah)]
103
14
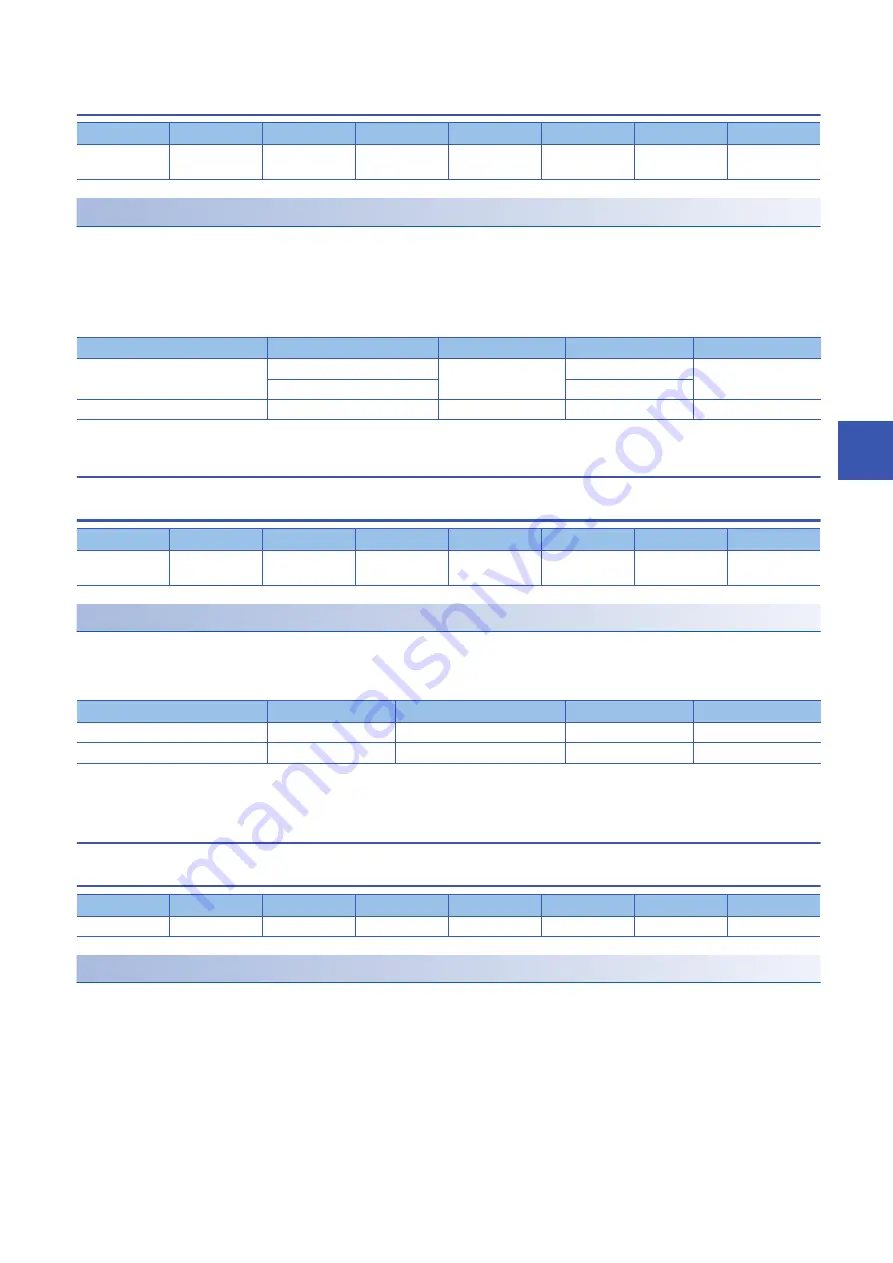
[Speed during search for zero (Obj. 6099h: 02h)]
Description
Set a creep speed after proximity dog at homing. If [Pr. PT02.7 Internal position command - Process speed selection] is set to
"0" and the set speed exceeds 8000 r/min (or mm/s), the servo motor speed is clamped at 8000 r/min (or mm/s). When
changing the maximum value of "Range" to the permissible speed, set [Pr. PA28.4 Speed range limit selection] to "1". The
description of the object varies as shown in the table below, depending on the combination of the setting of [Pr. PT01.1 Speed/
acceleration/deceleration unit selection] and the connected servo motor.
14.4
[Homing acceleration (Obj. 609Ah)]
[Homing acceleration (Obj. 609Ah: 00h)]
Description
Set the acceleration/deceleration time constants at homing. Set a time for the servo motor to reach the rated speed. The
description of the object varies as shown in the table below, depending on the combination of the setting of [Pr. PT01.1 Speed/
acceleration/deceleration unit selection] and the connected servo motor.
*1 When "0" is set, the servo motor decelerates in accordance with the setting value of [Pr. PT56].
14.5
[Supported homing method (Obj. 60E3h)]
[Supported homing method (Obj. 60E3h: 00h)]
Description
The total number of Sub Indexes is returned.
Data Type
Access
Mapping
Default
Range
Units
Save
Parameter
U32
RW
RXMAP
Refer to the
following.
0 to maximum
speed
vel units
Possible
Refer to the
following.
[Pr. PT01.1]
Connected servo motor
Default
Units
Parameter
0 (encoder unit)
Rotary servo motor
1000
0.01 r/min
[Pr. PT06]
Linear servo motor
0.01 mm/s
1 (command unit)
100000
pulse/s
[Pr. PV13]
Data Type
Access
Mapping
Default
Range
Units
Save
Parameter
U32
RW
RXMAP
Refer to the
following.
Refer to the
following.
acc units
Possible
Refer to the
following.
[Pr. PT01.1]
Default
Range
Units
Parameter
0 (encoder unit)
0
0 to 20000
ms
[Pr. PT56]
1 (command unit)
0
0 to 4294967295
pulse/s
2
[Pr. PV15]
Data Type
Access
Mapping
Default
Range
Units
Save
Parameter
U8
RO
Impossible
Impossible
Содержание MELSERVO J5 Series
Страница 2: ......
Страница 18: ...16 1 SUMMARY OF OBJECT DICTIONARY 1 1 Structure MEMO ...
Страница 121: ...18 Cyclic Synchronous Position Mode Objects 18 3 Torque offset Obj 60B2h 119 18 MEMO ...
Страница 125: ......







































































