





























DMU380ZA Series
User’s Manual
________________________________________________________________________
Doc# 7430-3810 Rev.02
Page 23
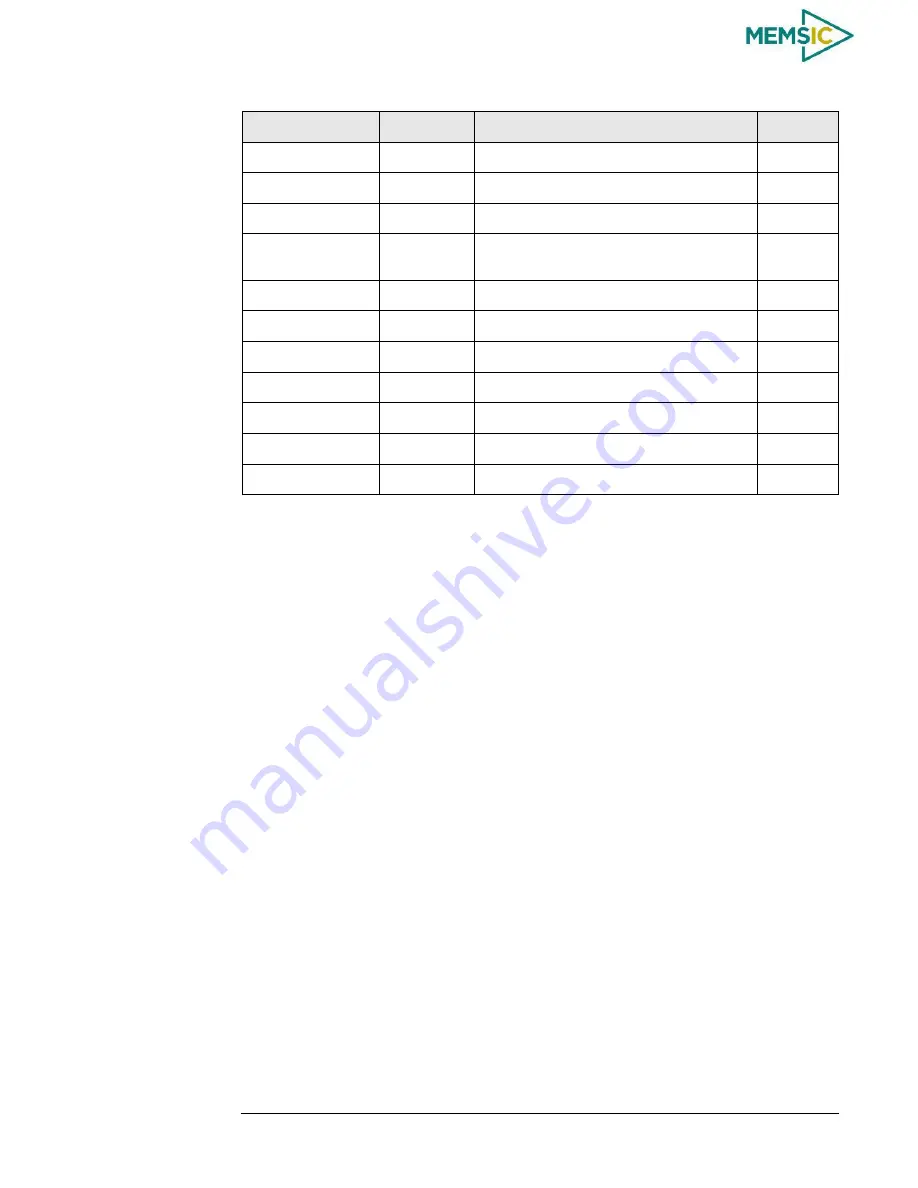
Table 11 AHRS380ZA Default BIT Status Definitions
BITstatus Field
Bits
Meaning
Category
masterFail
0
0 = normal, 1 = fatal error has occurred
BIT
HardwareError
1
0 = normal, 1= internal hardware error
BIT
comError
2
0 = normal, 1 = communication error
BIT
softwareError
3
0 = normal, 1 = internal software error or
magAlignOutofBounds
BIT
Reserved
4:7
N/A
masterStatus
8
0 = nominal, 1 = one or more status alerts
Status
hardwareStatus
9
Disabled
Status
comStatus
10
0 = nominal, 1 = No External GPS Comm
Status
softwareStatus
11
0 = nominal, 1 = Algorithm Initialization, or High Gain
Status
sensorStatus
12
0 = nominal, 1 = Sensor Over Range
Status
Reserved
13:15
N/A
The AHRS380ZA also allows a user to configure the Status byte within the BIT message.
To configure the word, select the BIT Configuration tab from the Unit Configuration
menu. The dialog box allows selection of which status types to enable (hardware,
software, sensor, and comm). Like the VG380ZA and IMU380ZA, MEMSIC
recommends for the vast majority of users, that the default Status byte for the
AHRS380ZA is sufficient. For users, who wish to have additional visibility to when the
AHRS380ZA EFK algorithm estimates that the AHRS380ZA is turning about its Z or
Yaw axis, the softwareStatus bit can be configured to go high during a turn. In other
words, the turnSwitch will turn on the softwareStatus bit. In the AHRS380ZA, the
turnSwitch is by default set at 0.5 deg/sec about the Z-axis.
INS380ZA Theory of Operation
3.5
The INS380ZA supports all of the features and operating modes of the
IMU/VG/AHRS380ZA, and it includes additional capability of interfacing with an
external GPS receiver and associated software running on the processor, for the
computation of navigation information as well as orientation information. The product
name, INS380ZA, stands for Inertial Navigation System 380, and it is indicative of the
navigation reference functionality that the INS380ZA provides by outputting inertially-
aided navigation information (Latitude, Longitude, and Altitude), inertially-aided 3-axis
velocity information, as well as heading, roll, and pitch measurements, in addition to
digital IMU data.
At a fixed 100Hz rate, the INS380ZA continuously maintains the digital IMU data; the
dynamic roll, pitch, and heading data; as well as the navigation data. As shown in the
software block diagram in Figure 4, after the Sensor Calibration block, the IMU data is
passed into an
“
Integration to Orientation
”
block. The
“
Integration to Orientation
”
block
integrates body frame sensed angular rate to orientation at a fixed 100 times per second
within all of the DMU380ZA Series products (except IMU380ZA). For improved
accuracy and to avoid singularities when dealing with the cosine rotation matrix, a
quaternion formulation is used in the algorithm to provide attitude propagation.







































































