





























Setup
Connection Specifications
maxon motor control
EPOS4 Positioning Controller
Document ID: rel8399
3-75
EPOS4 Module/Compact 50/8 Hardware Reference
Edition: November 2018
© 2018 maxon motor. Subject to change without prior notice.
3.4.11.2
Configuration
Setting the ID is currently available for CAN only!
The device’s identification (subsequently called “ID”) can be set by different means:
•
For configuration on
Compact
versions
“DIP Switch Configuration (SW1)” on page 3-44.
•
For configuration on
Module
versions, the ID is set using the input lines ID1…ID5. The ID
(1…31) may be coded using binary code.
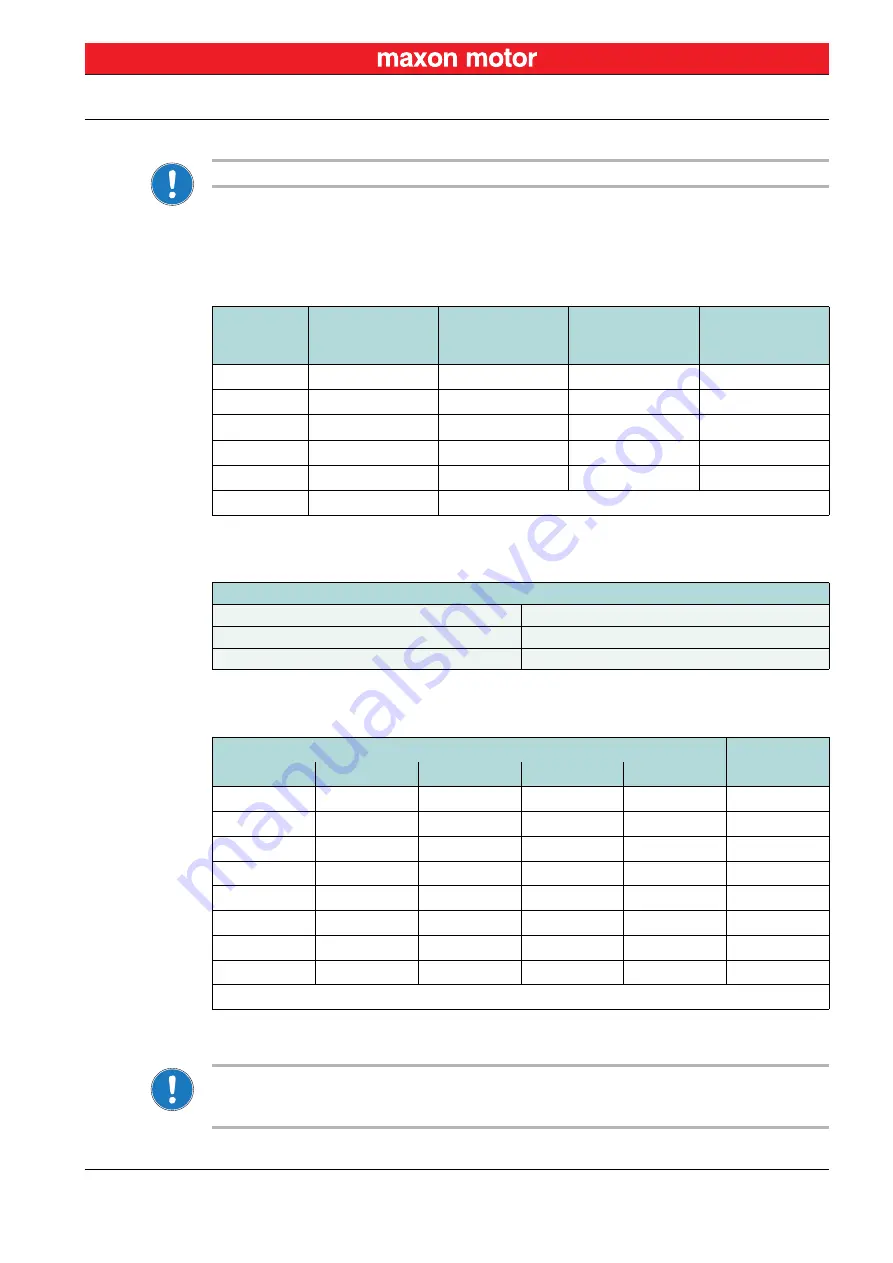
Table 3-64
ID – Pin assignment
The set ID can be observed by adding the valences of all inputs connected externally to GND. Use the
following table as a (non-concluding) guide:
Table 3-65
ID – Examples
Setting the ID by means of «EPOS Studio»
• The ID may be set by software (changing object 0x2000 «Node-ID», range 1…127).
• The ID set by software is valid if the ID is set to “0” (none of the ID input lines connected).
Module
Header
Pin
Signal
Description
Binary Code
Valence
B29
ID 1
CAN ID / DEV ID 1
2
0
1
B30
ID 2
CAN ID / DEV ID 2
2
1
2
B31
ID 3
CAN ID / DEV ID 3
2
2
4
B32
ID 4
CAN ID / DEV ID 4
2
3
8
B33
ID 5
CAN ID / DEV ID 5
2
4
16
B37
GND
Ground
CAN ID / DEV ID
Max. input voltage
3.3 VDC
Logic 1
connected to GND
Logic 0
not connected
CAN ID / DEV ID
ID
1
2
3
4
5
0*
0
0
0
0
–
1**
0
0
0
0
1
0
1
0
0
0
2
0
0
1
0
0
4
1
0
1
0
0
5
0
0
0
1
0
8
0
0
0
0
1
16
1
1
1
1
1
31
0* = ID input line not connected 1** = ID input line externally connected to GND







































































