





























Setup
Connection Specifications
maxon motor control
3-74
Document ID: rel8399
EPOS4 Positioning Controller
Edition: November 2018
EPOS4 Module/Compact 50/8 Hardware Reference
© 2018 maxon motor. Subject to change without prior notice.
3.4.11 CAN Interface / ID Setting
3.4.11.1
Connection
The EPOS4 is specially designed being commanded and controlled via a Controller Area Network
(CAN), a highly efficient data bus very common in all fields of automation and motion control. It is prefer-
ably used as a slave node in the CANopen network.
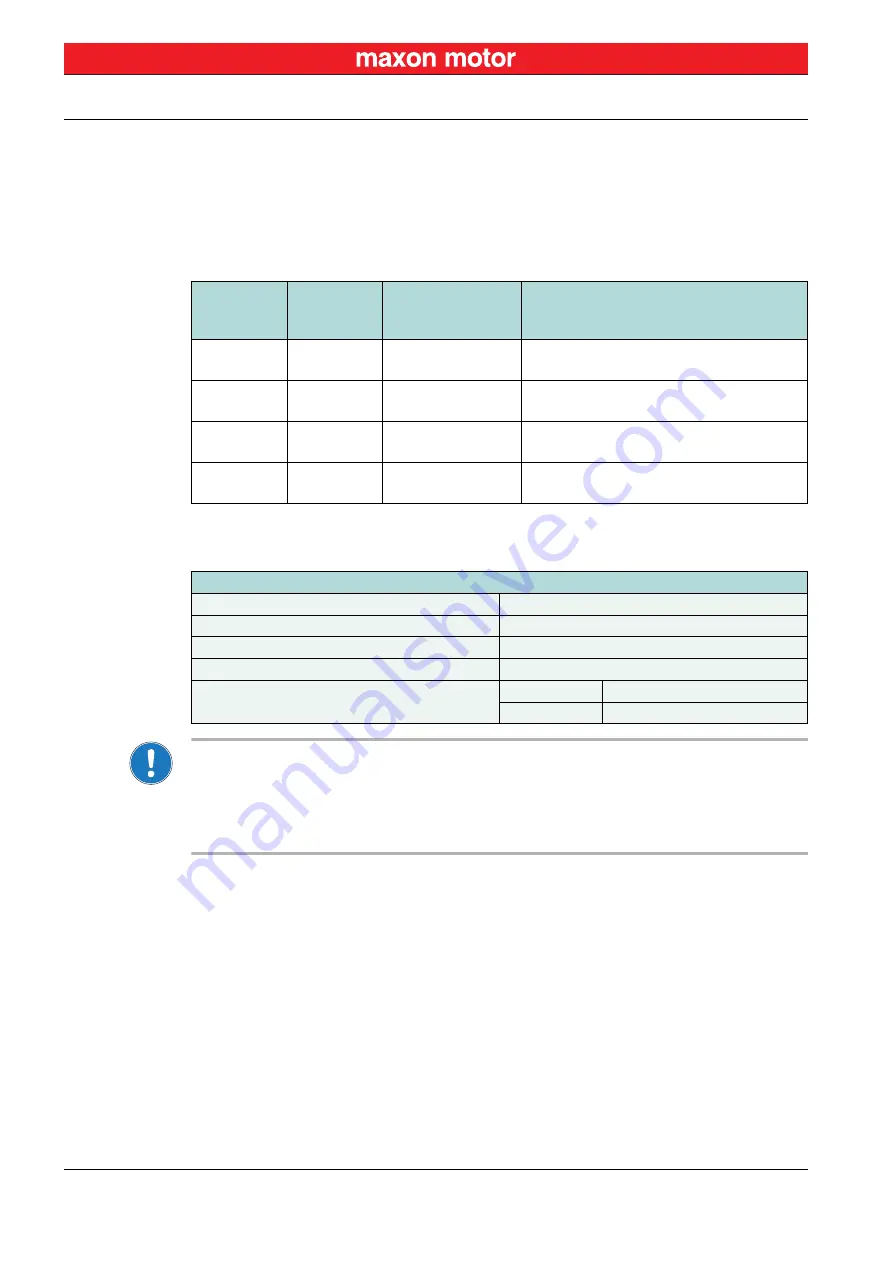
Table 3-63
CAN bus line / CAN 1 / CAN 2 – Pin assignment
Note
• Consider the CAN master’s maximal bit rate.
• The standard bit rate setting (factory setting) is 1 Mbit/s. For connector boards and Compact CAN
versions, automatic bit rate detection is set.
• Use 120
Ω
termination resistor at both ends of the CAN bus.
• For detailed CAN information
separate document «EPOS4 Communication Guide».
Module
Header
Pin
Compact/CB
Connector
Pin
Signal
Description
B35
X11 | 1
X12 | 1
CAN high
CAN high bus line
B36
X11 | 2
X12 | 2
CAN low
CAN low bus line
B37
X11 | 3
X12 | 3
GND
Ground
–
X11 | 4
X12 | 4
Shield
Cable shield
CAN interface
Standard
ISO 11898-2:2003
Max. bit rate
1 Mbit/s
Max. number of CAN nodes
127/31 (via software/hardware setting)
Protocol
CiA 301 version 4.2.0
Node-ID setting
Module
By external wiring or software
Compact CAN
By DIP switch or software







































































