





























EM3E Series EtherCAT Stepper Drive User Manual
19
(2) SW8 for Self Test
SW8 is used for self-test, when SW8=OFF, self-test is disabled, when SW8=ON, self-test is
activated,the motor will run at a speed of 0.2r/s, back and forth 5 circles.
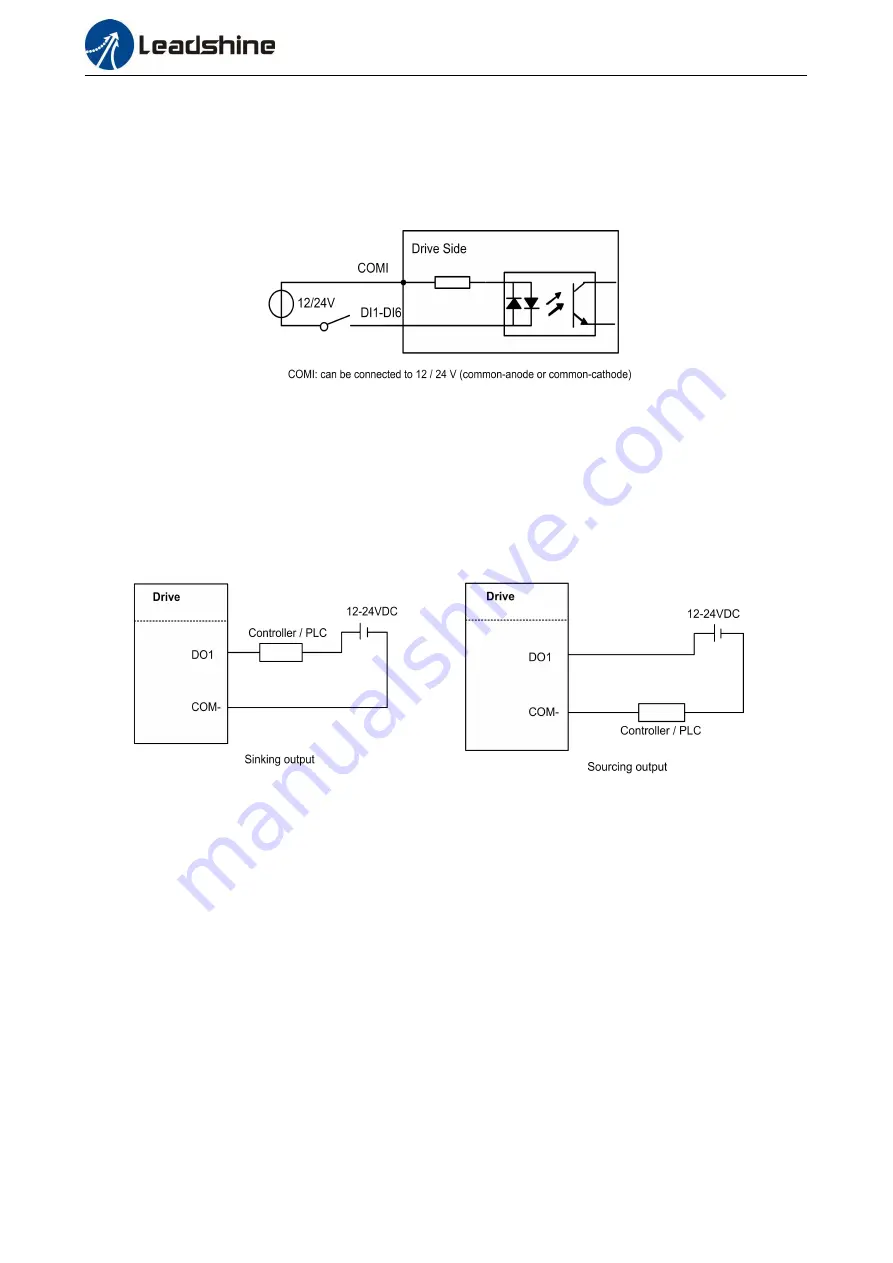
3.4 I/O Signals Wiring
3.4.1 Digital Input Wiring
Figure 3.4: Input Interface Connection
Note:
(1) Controller/PLC/Control card should provide input DC power 12-24V,current
≥
100mA.
(2) If the polarity of input DC power is reversed, the EtherCAT stepper drive won’t work; you
need to turn the wiring.
3.4.2 Digital Output Wiring
Figure 3.5: Output Interface Wiring
Note:
(1) The power supply (12-24VDC) above is provided by user,and if the polarity of power supply
is reversed,it will damage the drive.
(2) Digital output is OC output with the maximum capacity of 100mA/30V (recommended
50mA/25V), the provided power supply shoul
d be under 30V (recommended 24V),
otherwise it will cause damage to t
he drive.
3.4.3 Brake Output Wiring
This driver has a special brake output, built-in a fly-wheel diode, driving current up to 500 mA,
can directly drive the motor brake without relays. The connection is below:







































































