





























Koala 2.5 User Manual Rev 1.1
26
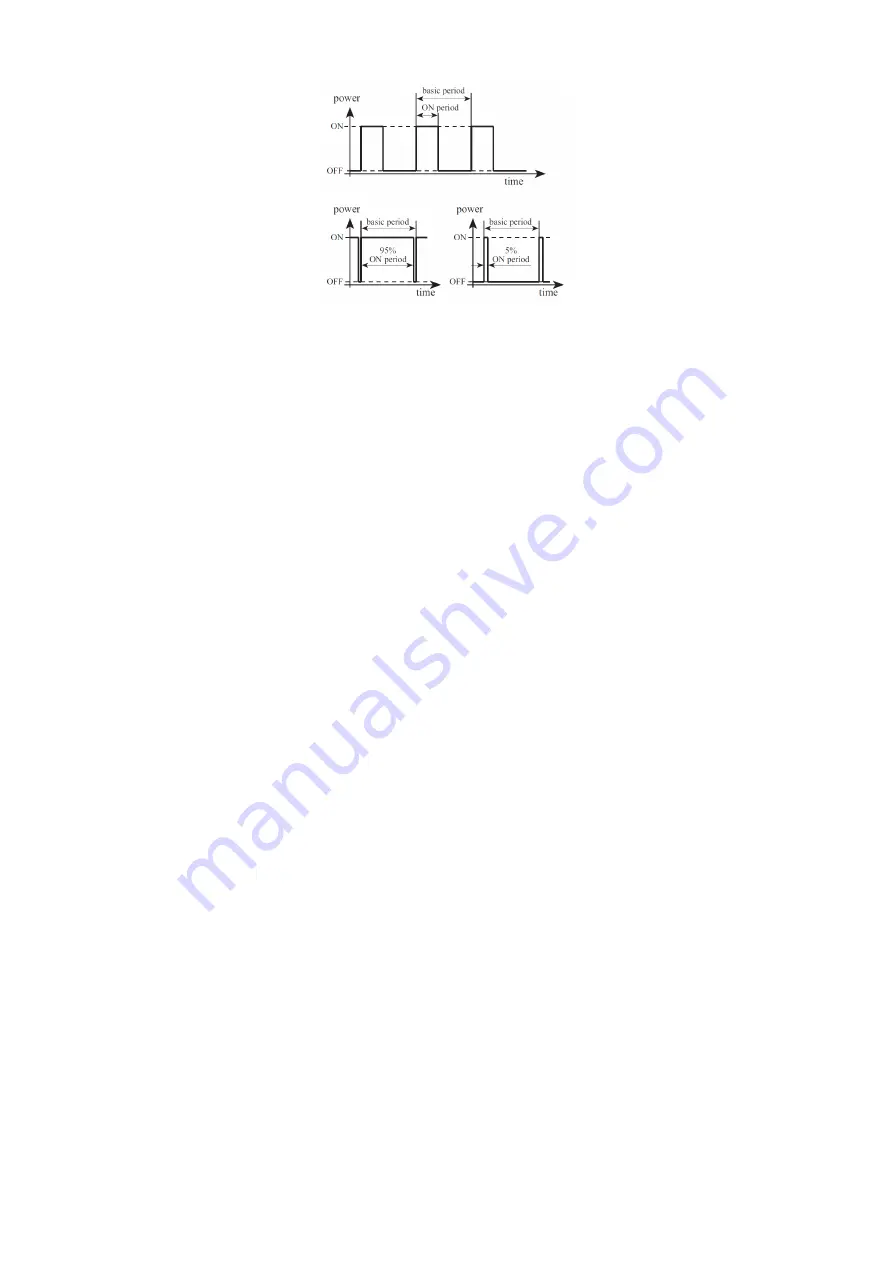
Figure 4.12: Duty cycle with PWM
The dsPIC calculates the PWM to apply to each motor in speed
control and position control. The user can override the PID and apply
directly a desired PWM to the motor using the open loop command
(see “L” command details).
Default PID settings applied to the koala controller are:
Kp:
10
Ki:
3
Kp:
1
These values will be used by the PID speed controller. In position
control, the PID is the same as the position controller calculates a
speed order then calls the speed controller to reach this order.
User can modify these values to improve behaviour to his particular
use.
In addition to the speed controller, a current limitation controller
verifies that the current of each motor does not exceed the
configured value (default = 1.0A). In this case, the controller will not
try to reach the desired speed, but will manage the PWM to keep the
motor current below the limit current. The state of the controller can
be checked at any time by the application with the command “Y”.
This current limitation is not active when used with the open loop
control mode.
When selecting a type of control, this mode will be applied to both
motors. It’s not possible to set the left motor in speed control and
the right motor in another mode.
To put the motor in idle mode (no more current drawn by the
motors), use the open loop command with parameters set to 0. In
speed control, even with a parameter of 0, the controller will struggle
against any movement.
Содержание Koala 2.5
Страница 1: ...KOALA 2 5 User manual Revision 1 2...
Страница 9: ...Koala 2 5 User Manual Rev 1 1 6 Figure 3 3 Bottom view 13 Gear Box 14 Docking station connection...
Страница 49: ...Koala 2 5 User Manual Rev 1 1 46 7 Mechanical drawings Unit is mm Figure 6 1 Top view...
Страница 50: ...Koala 2 5 User Manual Rev 1 1 47 Figure 6 2 Right view Figure 6 3 Front view...
Страница 53: ...K Team S A Z I Les Plans Praz 28 1337 Vallorbe Switzerland...







































































