





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
67
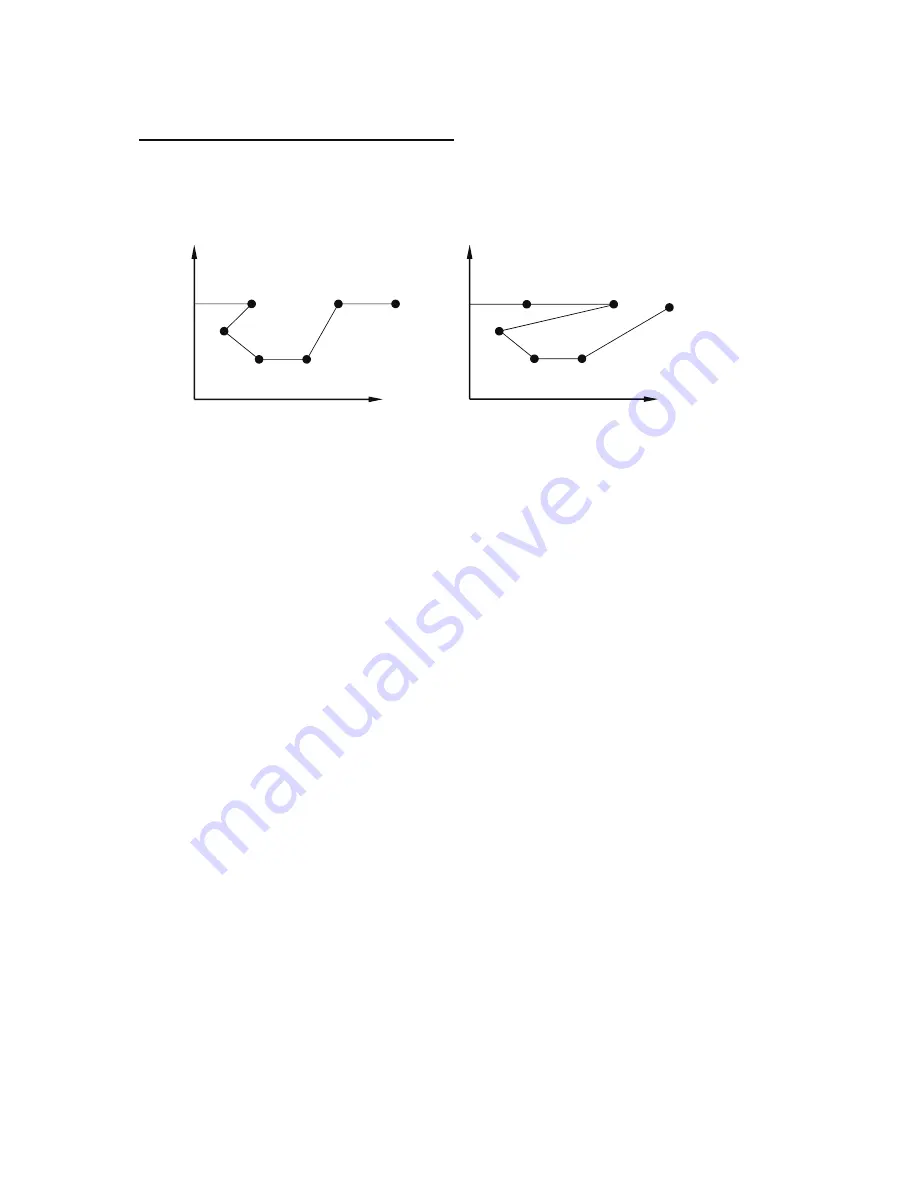
Example: The subprogram is set to [Absolute].
The tool unit runs on the coordinates of point data of the called point regardless of the position of the
calling point. At the current point (calling point), the tool unit performs the [Job on Start of Cycle] (set to
the work home position of the subprogram, and then shifts to SP1 (Subprogram Point 1).
z
When a program called by the
callProg
command contains a
callProg
command, an error (No.
044: [Program for callProg doesn't exist]) is returned if the nest level exceeds Level 10.
SP1
SP2
SP3
Calling Point
P7
P6
P8
Calling Point
P6
SP1
SP2
SP3
P7 P8






































































