





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
52
DELAY, DATA IN, WAIT START
■
Time Delay: delay
This section explains the point job data command for controlling time delay.
Command Category
Command
Parameter
Job
Delay, Data In,
Wait Start
delay
Delay Time Stand by in place for the specified delay time.
z
The
delay
command is deactivated at points where the (base) point type [CP Passing Point] is set.
■
delay
: Delay for the specified period of time
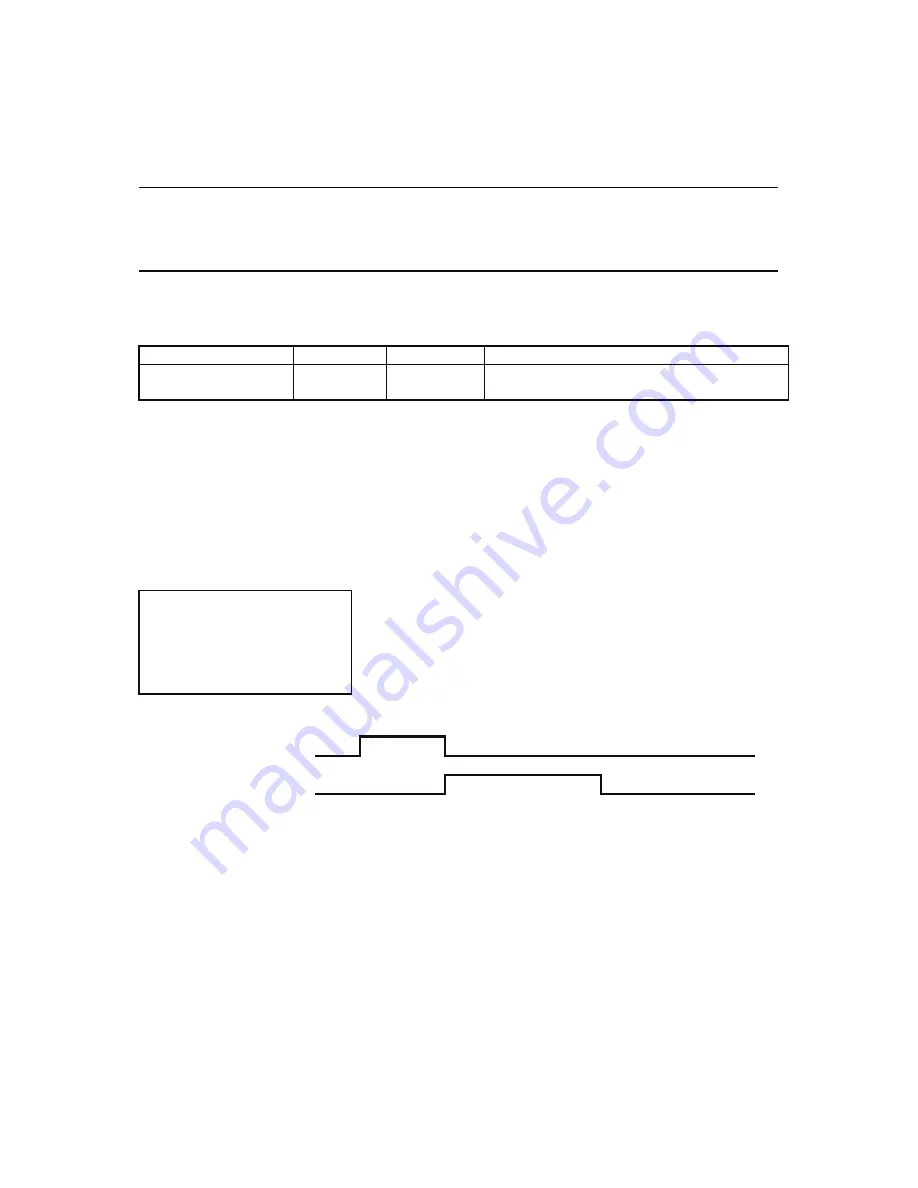
Example:
set #genOut1
delay 100
reset #genOut1
set #genOut2
delay 200
reset #genOut2
Output ON signal to #genOut1,
Delay for 0.1sec.
Output OFF signal to #genOut1.
Output ON signal to #genOut2.
Delay for 0.2sec.
Output OFF signal to #genOut2.
Å
0.1sec
Æ
Å
0.2sec
Æ
#genOut1
#genOut2
ON
OFF
ON
OFF







































































