





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
58
On the [Increment by Point Job] pallet, the tool unit can move randomly, as shown on the previous
page. For example, the tool unit returns to P1 each time before it moves to the next point. (P1
Æ
P2
(P2-1)
Æ
P1
Æ
P2-2
Æ
P1
Æ
P2-3…)
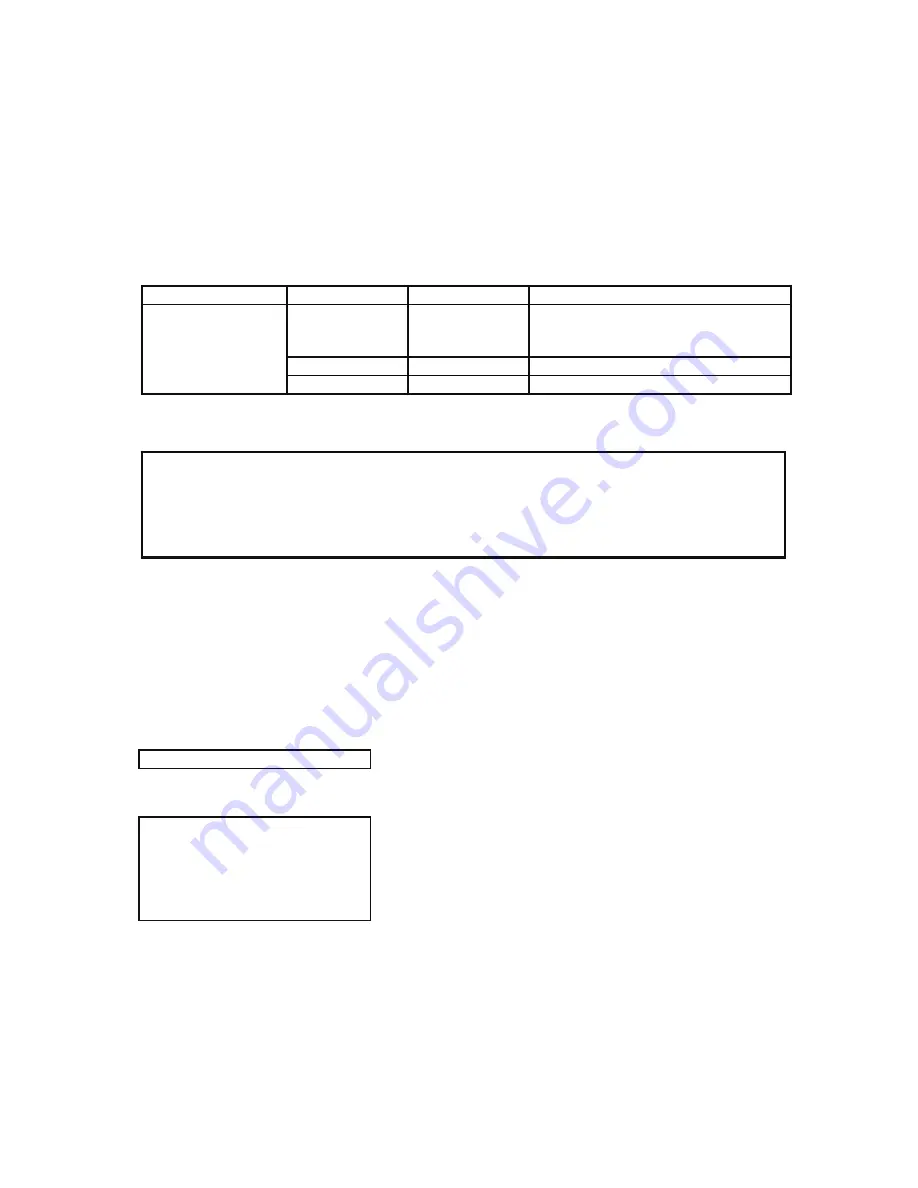
The following three commands are used for [Increment by Point Job]:
Command Category
Command
Parameter
Job
loopPallet
Pallet Number,
go Point Number
Add 1 to the pallet counter and if the
counter reaches maximum, the tool unit
will move to the specified point.
resPallet Pallet
Number Reset the counter to 0.
Pallet Control
incPallet
Pallet Number
Add 1 to the pallet counter.
The following two variables can also be used to control the pallet:
In the following example of point job data, the tool unit picks up the workpiece from P1 (
set #genOut1
)
and places it at P2 (
reset #genOut1
) on the [Increment by Point Job] pallet shown on the previous
page:
Point Job Data (to be set to P1)
set #genOut1
Picks up the workpiece.
Point Job Data (to be set to P2)
reset #genOut1
loopPallet 10,1
Releases (places) the workpiece.
Add 1 to the counter of Pallet No. 10.
If the counter reaches maximum, go to the next command.
(In this example, the point job is over because there are no
more commands.)
If the counter is not at maximum, move to P1.
z
The tool unit shifts (to P1 in the point job data for P2 above) using the
loopPallet
command
according to the program data [PTP Condition].
[palletFlag(n)]: A Boolean variable which has the following content:
•
The Pallet Counter (No. n) reaches maximum = ON (true)
•
The Pallet Counter (No. n) does not reach maximum = OFF (false)
[palletCount(n)]: A numeric variable which has the value of Pallet Counter (No. n)