





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
11
FUNCTION LIST
You can use the built-in functions (which are built into the robot as a function) and the user-defined
functions (which can be freely defined by the user).
The user-defined functions are defined in the Customizing mode. (See the operation manual
Features
IV
for details of the Customizing mode.)
x, y: Numerical value or numerical variable
n, m: Numeric value becomes larger than a certain value through rounding or truncation
a, b: String or string variable
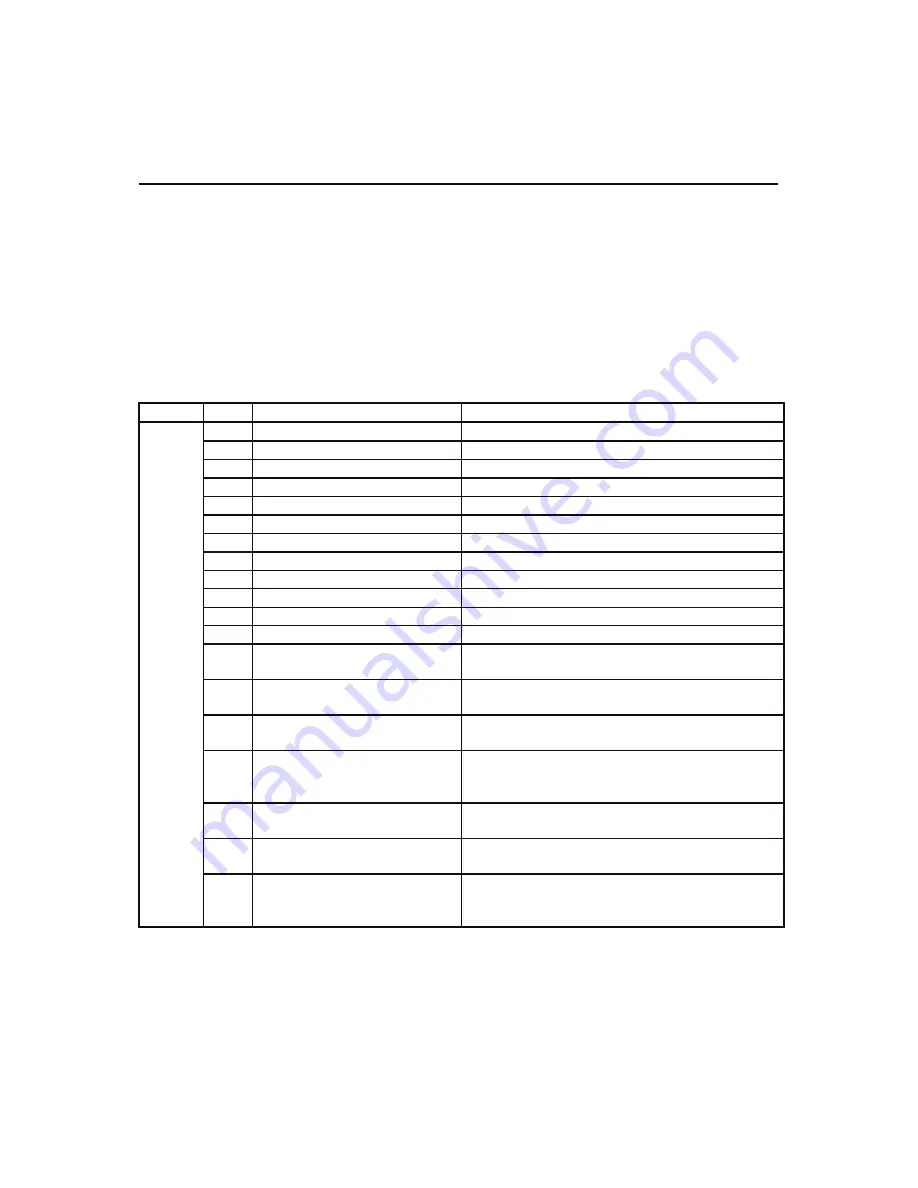
Category Type
Identifier
Description
num
currentMainProgNumber ()
Currently performed main program number
num
currentSubProgNumber ()
Currently performed sub program number
num
currentPointNumber ()
Currently performed point number
num
currentArmX ()
Current X-coordinate [mm]
num
currentArmY ()
Current Y-coordinate [mm]
num
currentArmZ ()
Current Z-coordinate [mm]
num
currentArmR ()
Current R-coordinate [deg]
num
currentCmdArmX ()
Current command X-coordinate [mm]
num
currentCmdArmY ()
Current command Y-coordinate [mm]
num
currentCmdArmZ ()
Current command Z-coordinate [mm]
num
currentCmdArmR ()
Current command R-coordinate [deg]
num
numCOM (COM port number) Data byte count of COM receiving port
num isConditionData
(n)
Display whether the specified condition data
number is available (1) or not (0).
str strCenterLCD
(a)
Adjust the strings on the teaching pendant LCD
(centering).
str strRightLCD
(a)
Adjust the strings on the teaching pendant LCD
(right justification).
str strPlusRLCD
(a,b)
Teaching pendant LCD: Right priority; Items on
the right are displayed in full if there is an
overlap.
str strPlusLLCD
(a,b)
Teaching pendant LCD: Left priority; Items on the
left are displayed in full if there is an overlap.
num getSystemPTPmoveTime
()
Valid only for [Job while Moving].
Time required for the current PTP drive [sec]
Robot
System
num getSystemPTPrestTime
()
Valid only for [Job while Moving].
Time left before the current PTP drive ends
(reaching the destination) [sec]