





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
38
z
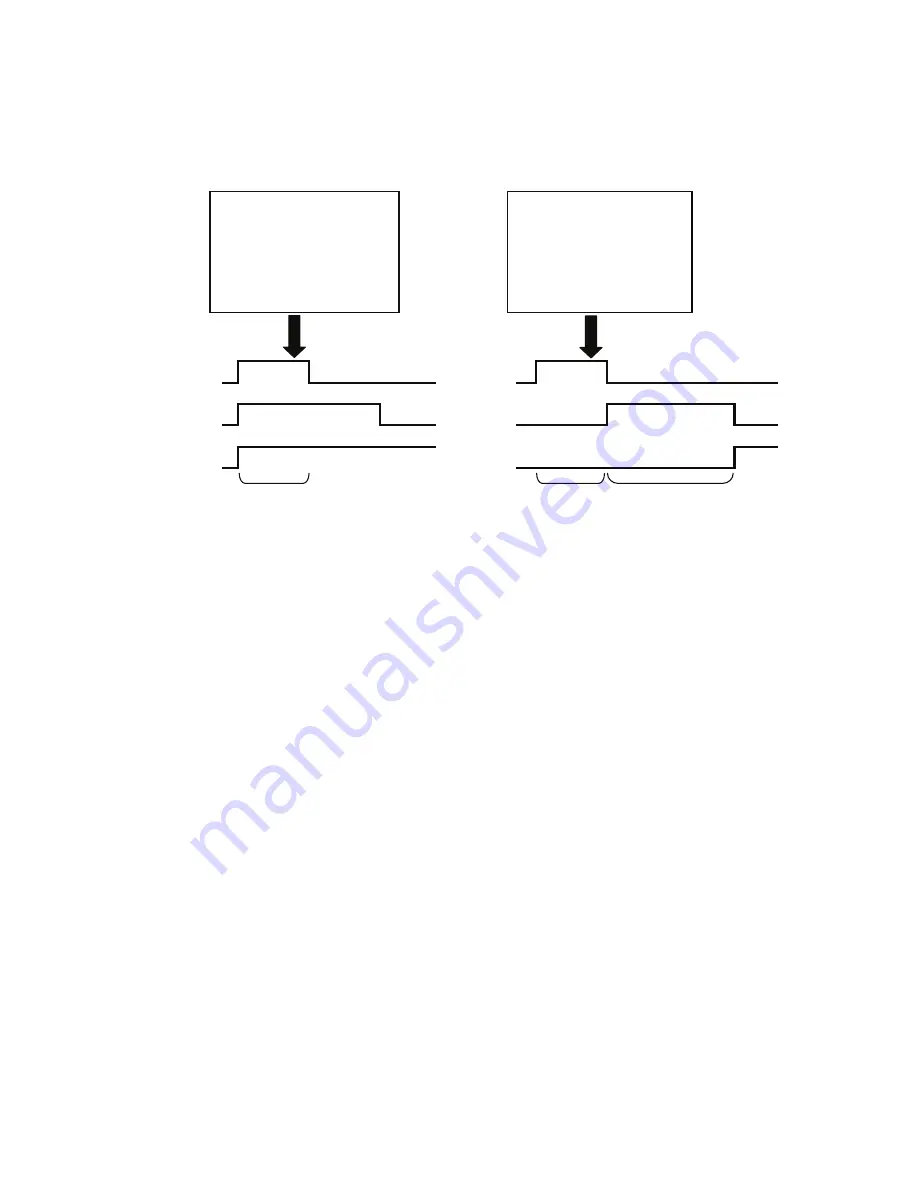
The
pulse
and
invPulse
commands move on to the next command before completing output.
For example, the following two kinds of point job data have different results:
pulse #genOut1 100
pulse #genOut2 200
set #genOut3
set
#genOut1
delay 100
reset #genOut1
set #genOut2
delay 200
reset #genOut2
set #genOut3
#genOut1
#genOut1
#genOut2
#genOut2
#genOut3
#genOut3
delay100
means “Stand by for 0.1 second at that point”.
z
You can set the pulse width for the
pulse
and
invPulse
commands using variables or expressions.
0.1sec
0.1sec
0.2sec