
















SMT-BD2
4.2
-
C
URRENT LIMITATION IN
L
IMITING MODE
When the amplifier RMS current (I
2
t) reaches 85 % of the
Rated current
, the Idyn signal output is activated and
the I
2
t error display is blinking on the amplifier front panel. When the RMS current (I
2
t) drops below 85 % of the
Rated current
, the Idyn signal and the blinking I
2
t error display are both cancelled.
When the amplifier RMS current (I
2
t) reaches the
Rated current
value, the I
2
t protection limits the amplifier
current at this value.
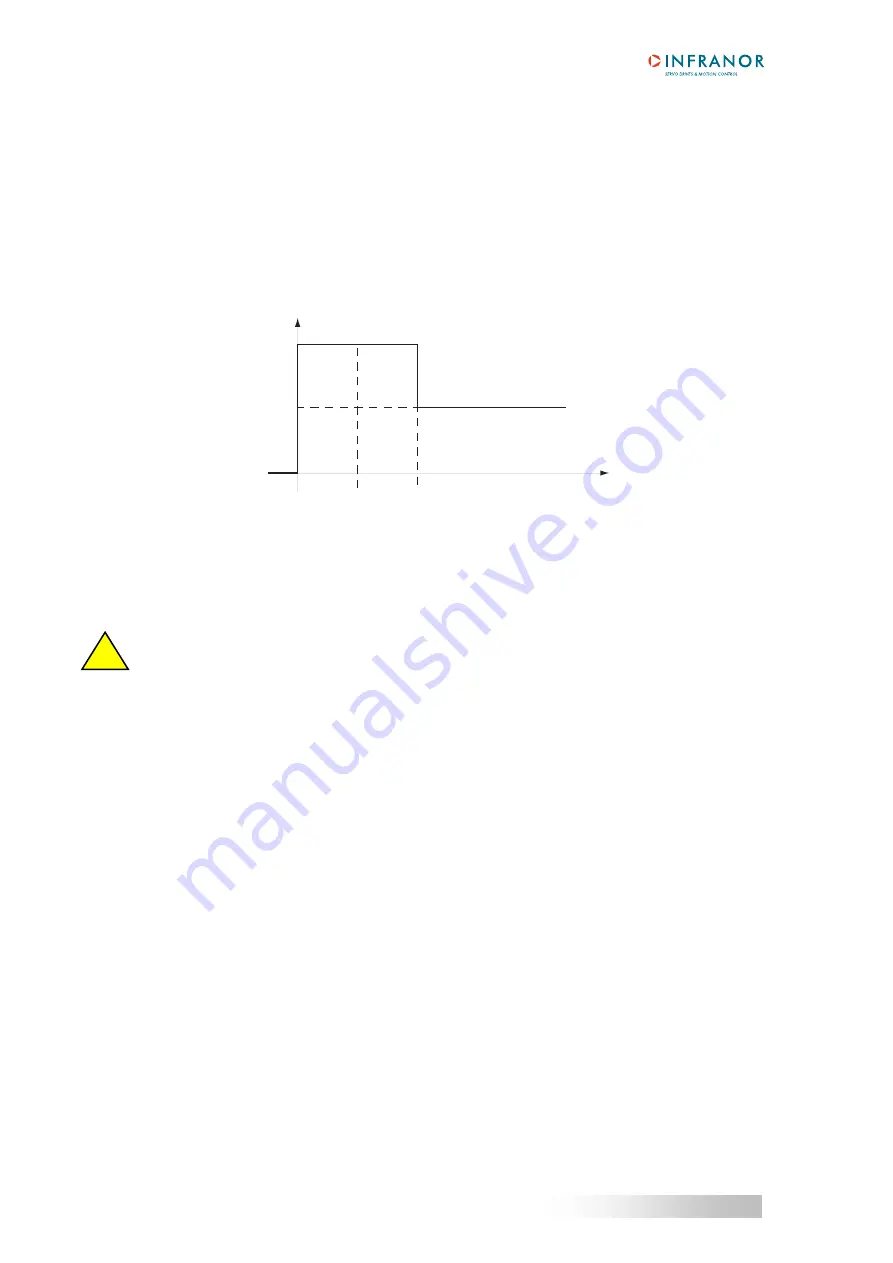
The amplifier current limitation diagram in an extreme case (motor overload or locked shaft) is shown below.
t0
t1
t2
Rated current
Maximum current
Amplifier current
t1 = Idyn signal
t2 = current limitation
Time
The maximum current duration before the release of the Idyn signal output (t1 - t0) and before limitation at the
rated current (t2 - t0) is calculated the same way as for the
Fusing
mode.
The I
2
t signal threshold values and the amplifier RMS current value on the digitizing oscilloscope, are also
calculated the same way as for the
Fusing
mode.
!
In
Limiting mode
, the amplifier
Rated current
value must be adjusted lower or equal to the
Maximum authorized continuous current
of the amplifier (
see Chapter 2, section 1
).
5 - COGGING COMPENSATION OPTION
The cogging torque in brushless permanent magnet rotating motors or the cogging force in brushless permanent
magnet linear motors result from the interaction between the permanent magnets and the winding frame slots.
This disturbance is due to the difference of reluctance between the copper of the windings and the iron of the
slots. For a given motor, the cogging can be easily evaluated by simply moving the motor manually when the
amplifier is disabled. The Cogging compensation option available in the SMT-BD2 amplifier allows to cancel the
motor cogging effects for specific applications where torque accuracy or force accuracy higher than 1 % are
required.
5.1
-
A
MPLIFIER CONFIGURATION
The cogging compensation option for both rotating and linear motors is available from the 6.1 version of the
amplifier firmware memory and the 1.04 version of the Visual Drive Setup software.
Check for the presence of the CT/BD2 memory mounted on the amplifier logic board (
see Chapter 5, section 1
Hardware adjustments
).
Check that the encoder marker pulse channel is enabled (ZM jumper in enabled position).
52
Chapter 8 – Appendix
Содержание SMT-BD2
Страница 1: ...SMT BD2 gb DIGITAL SERVO DRIVE FOR SINUSOIDAL BRUSHLESS AC MOTORS 1 SMT BD2 ...
Страница 2: ...SMT BD2 2 SMT BD2 ...
Страница 4: ...SMT BD2 4 SMT BD2 ...







































































