





















SMT-BD2
For the Sin/Cos encoder" configuration:
Check that the encoder signal jumpers COD are correctly set (position B2)
Check for the correct encoder supply voltage value
Check for the correct encoder-amplifier-motor ground and shield connections with regard to the
recommendations of
chapter 4
.
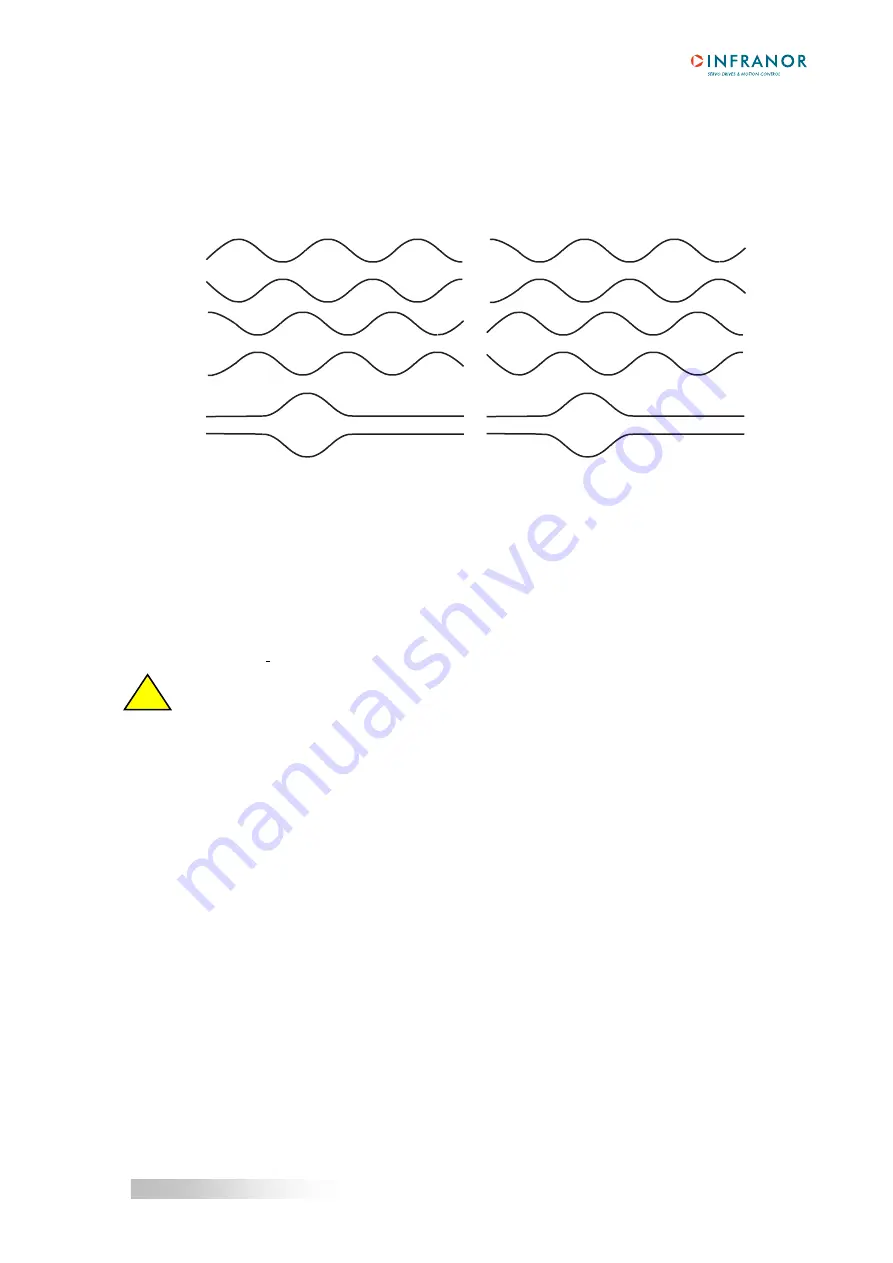
Check for the correct encoder A channel, B channel and R reference signal waveforms.
A
A/
B
B/
R
R/
A
A/
B
B/
R
R/
Forward direction
Reverse direction
Check for the correct
Motor encoder resolution
parameter value.
Check that the number of encoder pulses between two successive R reference signals is an entire multiple of
the
Motor encoder resolution
value. If this condition is not fulfilled, the encoder counting protection must be
disabled in order to cancel the "Counting" fault. The encoder counting protection can be inhibited by disabling
the encoder reference channel by means of the ZM jumper (
see section 2.8 "Encoder fault"
).
!
The encoder counting protection is checking that the encoder pulse count value between two
successive R reference signals is an entire multiple of the
Motor encoder resolution
value. When the
encoder counting protection has been disabled, the amplifier is only checking that the encoder pulse
frequency is lower than 1.5 times the maximum encoder frequency. The maximum encoder frequency
is calculated into the amplifier according to the
Motor encoder resolution
parameter value and the
Maximum speed
parameter value. In this case, encoder pulse noise at a frequency lower than 1.5
times the maximum encoder frequency can involve uncontrolled motor movements that may be
dangerous for operator and machine.
2.10
-
"I
2
T
"
FAULT
Check the rated current value required with regard to the current table (
see chapter 2, section 1
).
Check the amplifier rated current defined in the
Rated current
parameter with regard to the current required
for the operation cycle.
2.11
-
"TRACKING"
FAULT
Check that the
Speed following error threshold
parameter value is compatible with the required amplifier
operating cycle (speed profile and speed loop adjustments). If necessary, increase the
Speed following error
threshold
parameter value.
2.12
-
"ADC"
FAULT
On SMT-BD2/b amplifiers equipped with the 16 bit ADC option, check for the correct orientation and the
correct mounting of the 16 bit ADC component.
Check that the input command wiring between controller and amplifier corresponds to the recommendations
of
chapter 4
, and repeat the
Offset compensation
procedure.
If the fault still remains, the amplifier control board is not operating correctly.
47
Chapter 7 - Fault finding
Содержание SMT-BD2
Страница 1: ...SMT BD2 gb DIGITAL SERVO DRIVE FOR SINUSOIDAL BRUSHLESS AC MOTORS 1 SMT BD2 ...
Страница 2: ...SMT BD2 2 SMT BD2 ...
Страница 4: ...SMT BD2 4 SMT BD2 ...






































































