



























SMT-BD2
Chapter 6 - Commissioning
!
During the machine adjustments, some drive connection or parameter setting errors may involve
dangerous axis movements. It is the user's responsibility to take all necessary steps in order to
reduce the risk due to uncontrolled axis movements during the operator's presence in the concerned
area.
1 - CHECKING THE AMPLIFIER CONFIGURATION
1.1
-
S
TANDARD AMPLIFIER CONFIGURATION
The standard SMT-BD2 amplifier configuration is given below.
See chapter 5, section 1
"
Hardware
adjustments
"
for the jumpers location.
*
Inputs 0 V reference jumper I/O is open (optoisolated inputs)
*
Current loops adjustment jumpers in position B2 (medium gain)
*
Motor temperature sensor jumper in position MN (PTC sensor type)
*
Undervolt fault inhibition jumper in position JK ("Undervolt." fault enabled)
*
Serial link communication jumper in position B (RS-232 protocol)
*
Drive address selection jumpers in position OFF (address 0 selected)
*
Encoder signal jumpers COD in position B1 (TTL incremental encoder configuration)
*
Encoder marker pulse jumper in position ZM (encoder marker pulse enabled)
*
Commutation signal jumpers COM in position B3 (incremental encoder configuration without HES)
1.
2
-
E
NCODER CONFIGURATION
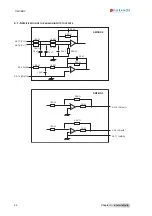
If the motor is equipped with a "TTL incremental encoder", select the following COD and COM jumpers setting.
COD
B5
B4
B2
B1
COM
B3
If the motor is equipped with a "Sin/Cos incremental encoder", select the following COD and COM jumpers
setting.
COD
B5
B4
B2
B1
COM
B3
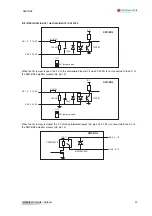
If the motor is equipped with an "Absolute single turn Sin/Cos encoder" (Heidenhain ERN 1085 or compatible),
select the following COD and COM jumpers setting.
COD
B5
B4
B2
B1
COM
B3
34
Chapter 6 – Commissioning
Содержание SMT-BD2
Страница 1: ...SMT BD2 gb DIGITAL SERVO DRIVE FOR SINUSOIDAL BRUSHLESS AC MOTORS 1 SMT BD2 ...
Страница 2: ...SMT BD2 2 SMT BD2 ...
Страница 4: ...SMT BD2 4 SMT BD2 ...







































































