





























3. Start up/Stop
TSα Series User Manual 25
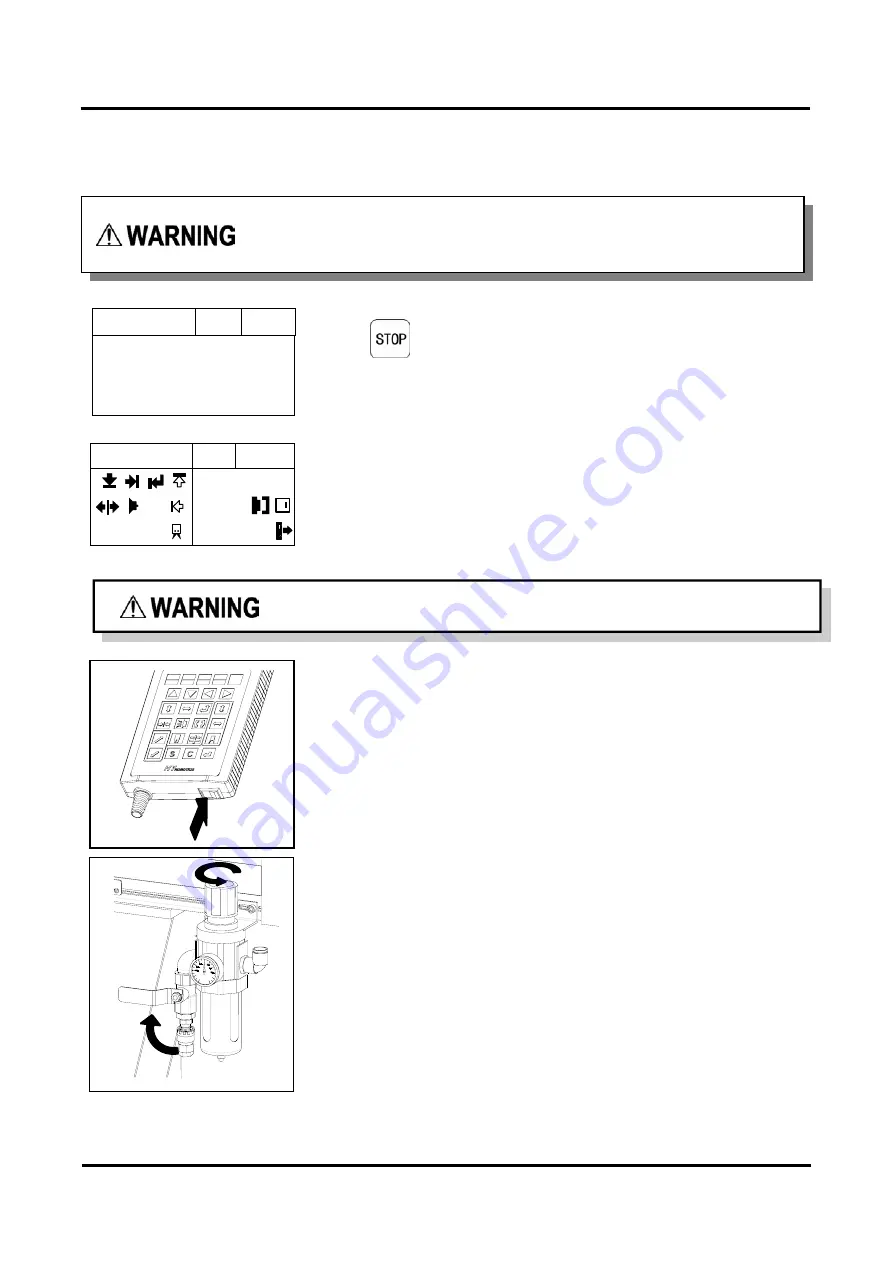
3.3 Stop Operation
z
STEP 1
Press
for Manual Mode.
It will stop the operation after finish to run last step. And moves to
Manual Mode.
It will not stop in the middle of step . If robot runs any step, it will
finish the step and stop before next step. ( Due to Pneumatic
Operation Pressure )
z
STEP 2
Turn Off Power
z
STEP 3
Disconnect Air Pressure.
AutoMod
03
0
>Down
Kick
ChuckOn
◀30%▶
Manual
0
30
Turn Off Handy Controller, Power off Molding Machine.
Follow the next step to stop the robot. Power off and Disconnect air.
Содержание TS-200DI
Страница 2: ......
Страница 14: ...xii...
Страница 15: ...xiii...
Страница 19: ......
Страница 20: ......
Страница 21: ...1 Introduction...
Страница 22: ......
Страница 28: ......
Страница 29: ...2 Before Operation...
Страница 30: ......
Страница 41: ...3 START UP STOP...
Страница 42: ......
Страница 47: ...4 OPERATION...
Страница 48: ......
Страница 110: ...4 Operation 90 TS Series User Manual 4 10 Change Language Press and at the same time change Korean English Chinese...
Страница 114: ......
Страница 115: ...5 Follow Up...
Страница 116: ......
Страница 126: ......
Страница 127: ...6 Error...
Страница 128: ......
Страница 134: ......
Страница 135: ...Appendix...
Страница 136: ......
Страница 139: ...Appencix TS Series User Manual 119 B 2 TS 300DI dimension Unit mm Type A B 300SI 1005 58 300DI 875 188...
Страница 141: ...Appencix TS Series User Manual 121 C 2 TS 300DI Unit mm Type A B C D 300SI 1173 58 1273 235 300DI 1043 20 1243 280...
Страница 143: ......







































































