





























4. Operation
82 TSα Series User Manual
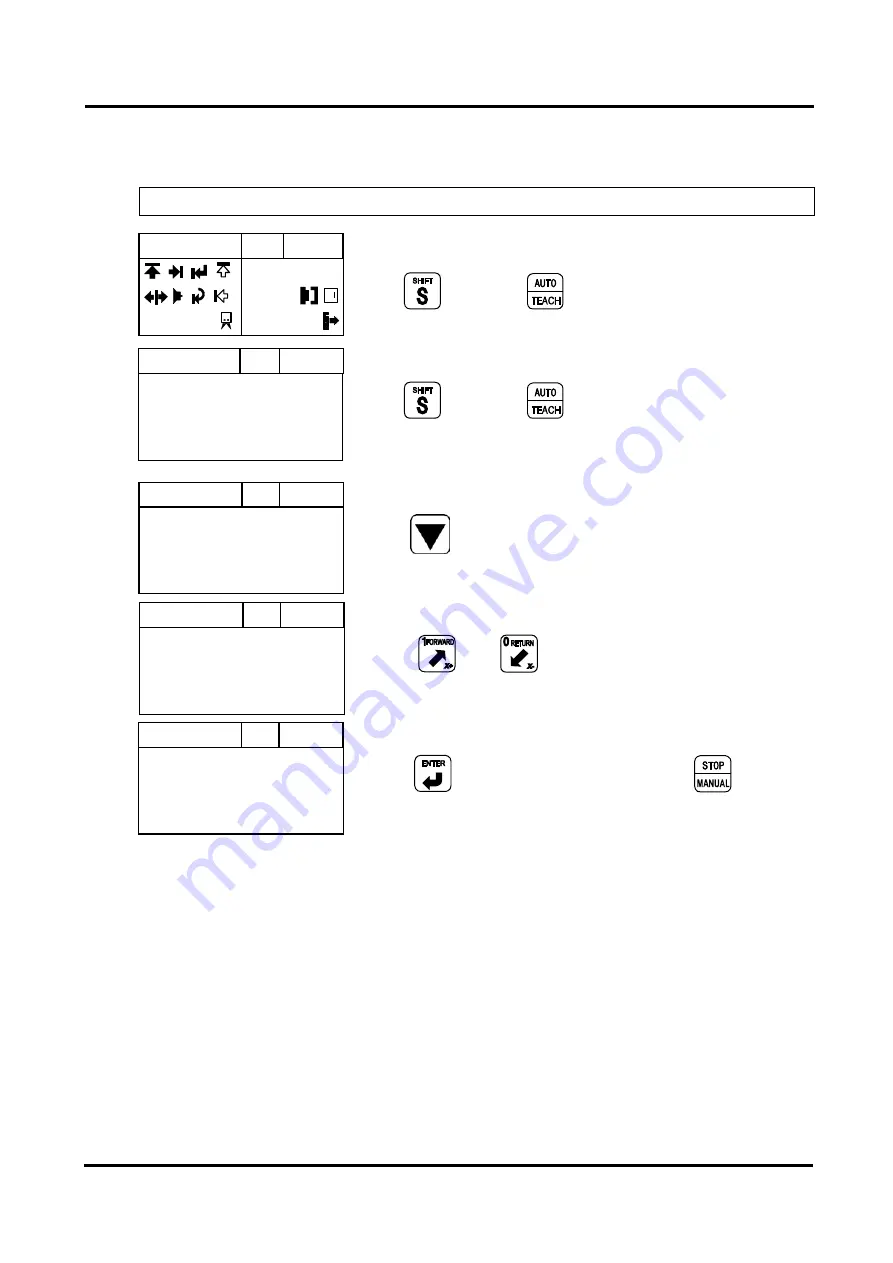
(3) Position setting with Jog Key
Set Reject Position to 100mm.
z
STEP 1
Hold
and press
, move to Mold Number screen.
z
STEP 2
Hold
and press
again, move to Jog Input screen.
z
STEP 3
Press
to select Reject Position.
z
STEP 4
Press
or
move robot to Defective parts
Release( Off ) position.
z
STEP 5
Press
to save position data, press
to move
Manual Mode screen.
P0SubOff ◀30%▶
Set Now
0mm < 0mm
Jog
30
1100
P1RjtOff ◀30%▶
Set Now
1100mm < 1100mm
Jog
30
1100
◀30%▶
Manual
0
30
>P0SubOff
0000mm
P1RjtOff
0000mm
P2NipON
0000mm
Numbmer 30
0000
P1RjtOff ◀30%▶
Set Now
0mm < 0mm
Jog
30
1100
Содержание TS-200DI
Страница 2: ......
Страница 14: ...xii...
Страница 15: ...xiii...
Страница 19: ......
Страница 20: ......
Страница 21: ...1 Introduction...
Страница 22: ......
Страница 28: ......
Страница 29: ...2 Before Operation...
Страница 30: ......
Страница 41: ...3 START UP STOP...
Страница 42: ......
Страница 47: ...4 OPERATION...
Страница 48: ......
Страница 110: ...4 Operation 90 TS Series User Manual 4 10 Change Language Press and at the same time change Korean English Chinese...
Страница 114: ......
Страница 115: ...5 Follow Up...
Страница 116: ......
Страница 126: ......
Страница 127: ...6 Error...
Страница 128: ......
Страница 134: ......
Страница 135: ...Appendix...
Страница 136: ......
Страница 139: ...Appencix TS Series User Manual 119 B 2 TS 300DI dimension Unit mm Type A B 300SI 1005 58 300DI 875 188...
Страница 141: ...Appencix TS Series User Manual 121 C 2 TS 300DI Unit mm Type A B C D 300SI 1173 58 1273 235 300DI 1043 20 1243 280...
Страница 143: ......

































































