


















Chapter 9 Ordering Guide
91
Chapter 9 Ordering Guide
9.1 Capacity Selection
To determine the capacity of a servo device, give comprehensive consideration of its load inertia,
load torque, required positioning accuracy and required maximum speed in the following steps:
1
)
Calculate its load inertia and torque
Calculate its load inertia, load torque, acceleration/deceleration torque, load torque and active
torque as the basis for further selection by consulting the related data.
2
)
Preliminarily determine the mechanical gear ratio
Calculate the maximum mechanical gear reduction ratio using the required maximum speed and
maximum rotating speed of the motor and check that reduction ratio and the minimum unit of
revolution can satisfy the requirements of minimum unit of position. For high requirement for position
accuracy, increase the mechanical reduction ratio (the actual maximum speed is reduced) or use a
motor with higher rotating speed.
3
)
Check the inertia and torque
Convert the load inertia and load torque to the motor axis with the mechanical reduction ratio.
The converted inertia and active torque shall not exceed five times the inertia of the motor inertia and
the rated torque of the motor respectively. If the above requirements cannot be fulfilled, increase the
mechanical reduction ratio (the actual maximum speed is reduced) or use a motor with higher rotating
speed.
9.2 Electronic Gear Ratio
Refer to Chapter 4 (Table 4-2 Functions of Parameters), Chapter 6 (6.3 Parameter Setting) and
Chapter 7 (7.3 Adjustment) for the meaning and adjusting methods of the electronic gear ratio G.
The actual speed of the load in position control mode is:
Command pulse speed ×G× Mechanical reduction ratio
The actual minimum displacement of the load in the position control mode is:
Minimum command pulse stroke x G x Mechanical reduction ratio
Note: when the electronic gear ratio G is not 1, there may be a remainder in the division operation of the gear
ratio. Now there is a position deviation and the maximum deviation is the minimum movement
(minimum resolution).
Содержание DA98E Series
Страница 1: ......
Страница 20: ...Chapter 1 Summary 11 2 Appearance of Servomotor ...
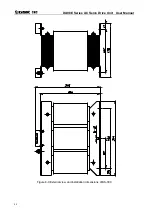
Страница 95: ...DA98E Series AC Servo Drive Unit User Manual 86 Figure 8 7 External view and installation dimensions of BS 120 ...
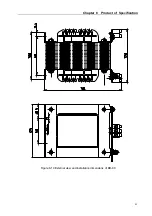
Страница 96: ...Chapter 8 Product of Specification 87 Figure 8 8 External view and installation dimensions of BS 200 ...
Страница 97: ...DA98E Series AC Servo Drive Unit User Manual 88 Figure 8 9 External view and installation dimensions of BS 300 ...
Страница 98: ...Chapter 8 Product of Specification 89 Figure 8 10 External view and installation dimensions of BD 80 ...





















































