


















4
85201A_RK5C_User Manual_02-2017_ENG
2.2 OPERATING PARAMETERS SETTING
After configuring the node parameters, the sensor can be integrated in the CANopen network. When powering on, the
sensor transmits the boot-up message, and it goes into the Pre-operational state.
Before requesting process data, configuration of operating parameters of the sensor can be performed. Configuration
of operating parameters is made through SDO Services (Service Data Objects). Through SDO services, it is possible for
example to change the transmission type of the PDO (Process Data Object) selecting the synchronous (through SYNC
messages) or asynchronous (through event-timer) mode, or transmission time (event timer) of the asynchronous PDO.
It is possible to save changed parameters in non-volatile memory accessing the Store Parameters object through SDO,
or restore default parameters with the Restore Default Parameters object.
It is possible to access all the objects specified in the Object Dictionary of the device (see Object Dictionary section).
SDO Services are available in Pre-operational and Operational states only (see NMT Services section).
2.3 REQUESTING PROCESS DATA
The GEFRAN RK5C CANopen position sensor provides one Transmit PDO (TPDO1), that includes position and speed
data measured by the sensor.
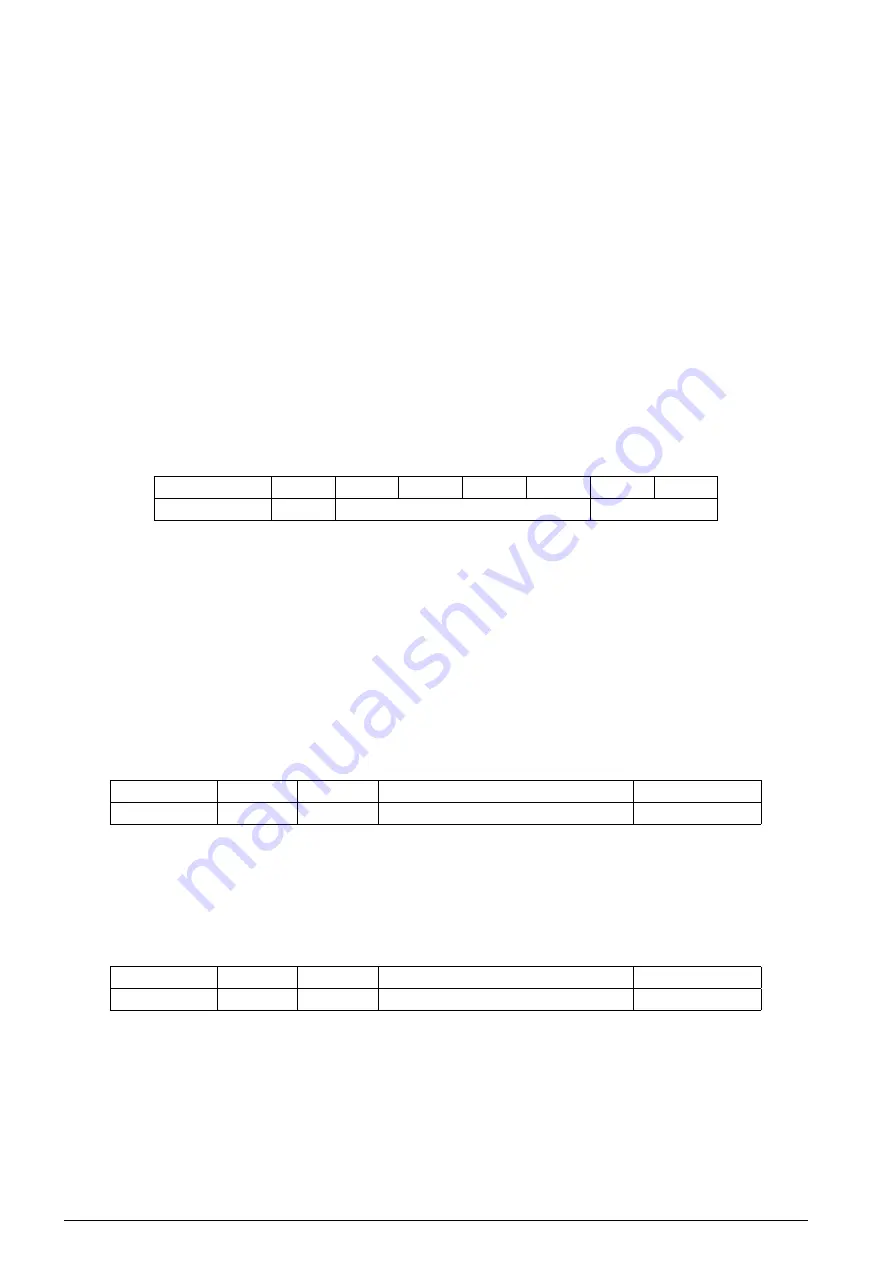
TPDO1 data format
Position and speed data are mapped in TPDO1 as shown in the following figure.
COB-ID
DLC
D0
D1
D2
D3
D4
D5
180h + Node-ID
6
Position value
Speed value
Figure 6 - TPDO1 mapped data
The position data is expressed with a fixed resolution corresponding to 100 μm, in INTEGER32 data format. The speed
data in expressed with a 1mm/s resolution, in INTEGER16 data format. Byte ordering of position and speed data inside
TPDO1 follows the LSB..MSB ordering scheme.
Position and speed values are calculated as follows:
Position [μm]= Position value * 100 μm
Speed [mm/s] = Speed value * 1 mm/s
TPDO1 data transmission
The transmission of the Process Data Object is made when the sensor is in Operational state. To start data transmission,
the master sends the NMT “Start” command, as shown in the following figure.
Source
COB-ID
DLC
Data
Destination
Controller
000h
02h
01h;
00h*
Sensor
Figure 7 - NMT “Start” command
* 00h: all nodes, nnh: only the node with Node-ID equal to nnh
To stop data transmission the master sends the “Enter NMT Pre-operational state” command, as shown in the following
figure.
Source
COB-ID
DLC
Data
Destination
Controller
000h
02h
80h;
00h*
Sensor
Figure 8 - NMT “Enter NMT pre-operational” command
* 00h: all nodes, nnh: only the node with Node-ID equal to nnh