





























Unidrive M702 User Guide
85
Issue Number: 3
5
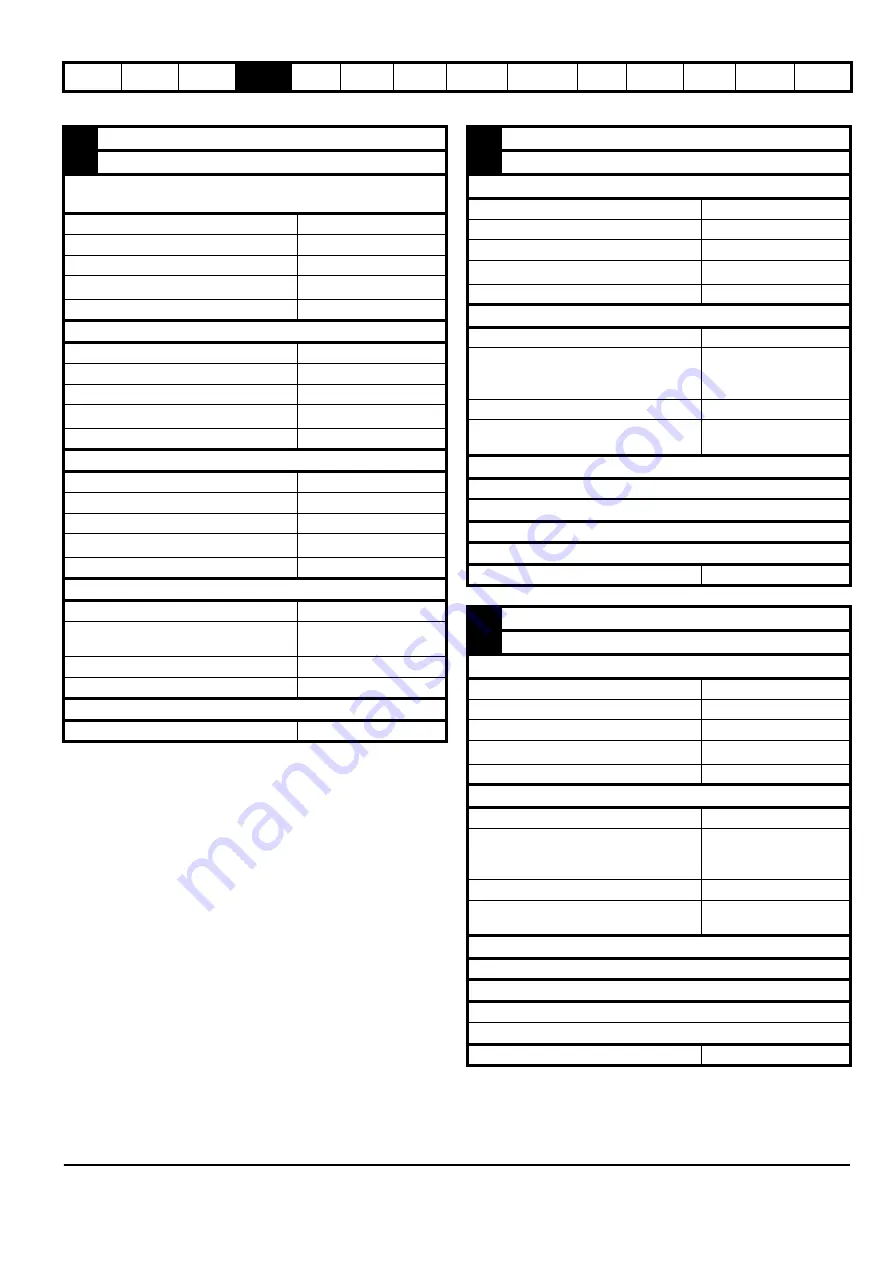
Z, Data, Freeze, Ref H
6
Z\, Data\, Freeze\, Ref L
AB (0), FD (1), FR (2), AB Servo (3), FD Servo(4), FR Servo (5
),
SC SC (15)
Type
EIA 485 differential receivers
Maximum input frequency
512 kHz
Line loading
Line termination components
120
Ω
(switchable)
Working common mode range
–7 V to +12 V
SC Hiperface (7), SC EnDat (9), SC SSI (11), SC Servo (12)
Type
EIA 485 differential receivers
Maximum input frequency
4 MHz
Line loading
Line termination components
120
Ω
(switchable)
Working common mode range
–7 V to +12 V
EnDat (8), SSI (10), BiSS (13
)
Type
EIA 485 differential receivers
Maximum input frequency
4 MHz
Line loading
Line termination components
120
Ω
(switchable)
Working common mode range
–7 V to +12 V
Resolver (14)
Type
Differential voltage
Nominal voltage
0 – 2 Vrms depending on turns
ratio
Operating frequency
6 - 8 KHz
Line loading
Common to All
Absolute maximum applied voltage relative to 0V -9 V to 14 V
7
U, C, Not used, Not used
8
U\, C\, Not used, Not used
AB Servo (3), FD Servo(4), FR Servo (5
),
SC Servo (12)
Type
EIA 485 differential receivers
Maximum input frequency
512 kHz
Line loading
Line termination components
120
Ω
(switchable)
Working common mode range
–7 V to +12 V
SC SC (15)
Type
Differential voltage
Maximum Signal level
1.25 V peak to peak (sin with
regard to sinref and cos with
regard to cosref)
Maximum input frequency
Maximum applied differential voltage and
common mode voltage range
±
4 V
EnDat (8), SSI (10), BiSS (13)
Not used
Resolver (14)
Not used
Common to All
Absolute maximum applied voltage relative to 0V -9 V to 14 V
9
V, D, Not used, Not used
10
V\, D\, Not used, Not used
AB Servo (3), FD Servo(4), FR Servo (5
),
SC Servo (12)
Type
EIA 485 differential receivers
Maximum input frequency
512 kHz
Line loading
Line termination components
120
Ω
(switchable)
Working common mode range
–7 V to +12 V
SC SC (15)
Type
Differential voltage
Maximum Signal level
1.25 V peak to peak (sin with
regard to sinref and cos with
regard to cosref)
Maximum input frequency
Maximum applied differential voltage and
common mode voltage range
±
4 V
EnDat (8), SSI (10), BiSS (13)
Not used
Resolver (14)
Not used
Common to All
Absolute maximum applied voltage relative to 0V -9 V to 14 V
Содержание Unidrive M702
Страница 283: ......
Страница 284: ...0478 0002 03 ...







































































