





























Page 60 of 126
Doc No.
:
T202001004
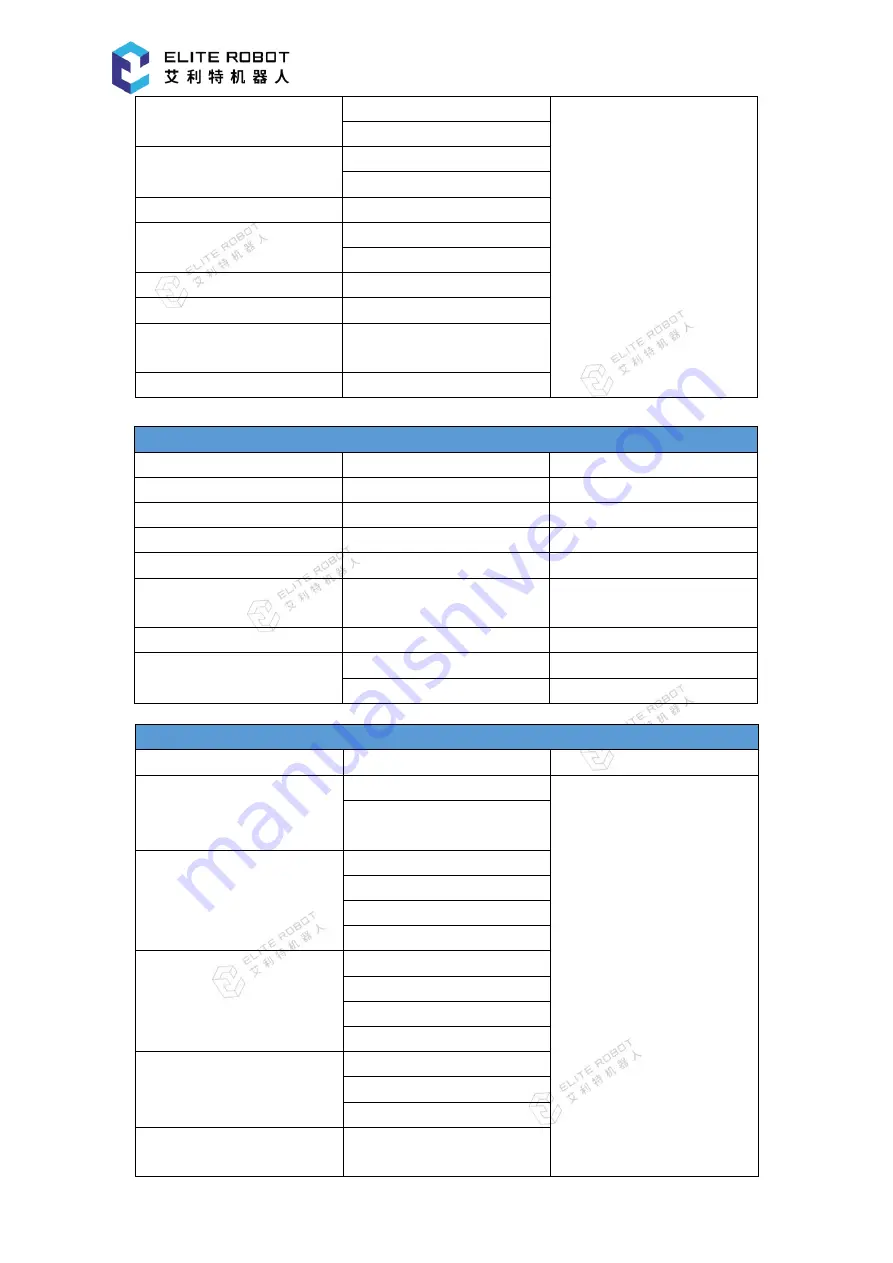
Copy
Line copy
Expert user
Block copy
Cut
Line cut
Block cut
Paste
Delete
Line delete
Block delete
Search
Replace
Logic instruction
customization
Reset
Parameter Setting
First Level Menu
Second Level Menu
Operation Authority
Speed parameter
Root
System parameters
Administrator
Limit parameter
Root
Servo parameter
Administrator
Institutional
parameter
Administrator
Other parameters
Administrator
Permission
Switch user
General user
Change password
Expert user
Monitoring
First Level Menu
Second Level Menu
Operation Authority
Coordinate
Joint coordinates
General user
Cartesian
coordinates
Variable
Variable B
Variable I
Variable D
Variable P
IO
Input
Output
Virtual input
Virtual output
Motor
Impulse
Motor speed
Absolute position
Operational
monitoring






































































