



























Mechanical Operations and Maintenance Manual for Industrial Robot ER10-1600
18
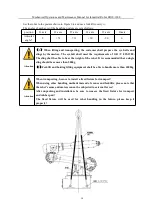
Set the robot to the posture shown in Figure 3-4 and use a forklift to carry it.
The angles of each axis of the handling posture are set as follows:
position
J1 axis
J2 axis
J3 axis
J4 axis
J5 axis
J6axis
Articular
angle/°
0
+78
-72.5
﹢
90
-90
0
Attention
(
1
)
When lifting and transporting, the customer shall prepare the eye bolts and
slings by themselves. The eyebolt shall meet the requirements of GB / T 825-1988.
The sling shall be able to bear the weight of the robot. It is recommended that a single
sling should bear more than 500kg
(
2
)
Forklift and hoisting lifting equipment shall be able to handle more than 1000kg
Attention
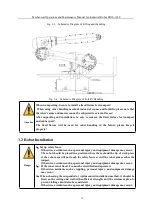
When transporting, be sure to install a fixed fixture for transport!
When using other handling methods instead of cranes and forklifts, please note that
the robot's arms and motors cannot be subjected to external forces!
After unpacking and installation, be sure to remove the fixed fixture for transport
and rubber pad!
The fixed fixture will be used for robot handling in the future, please keep it
properly!







































































