























Mechanical Operations and Maintenance Manual for Industrial Robot ER10-1600
35
4.6 Home Position Calibration
Home position calibration refers to an operation performed to associate the angle of each robot axis
with the encoder count value. The purpose of the home position calibration operation is to obtain the
encoder count value corresponding to the home position.
"Home position calibration" is done before leaving the factory. In daily operations, there is generally
no need to perform home position calibration operations. However, in the following cases, it is necessary to
perform the home position calibration operation.
1
)
If the servo motor is replaced.
2
)
If the encoder is replaced.
3
)
If the reducer is replaced.
4
)
If the cable is replaced.
4.6.1 Home Position Calibration Method
Home position calibration is a relatively complicated process. According to the current actual situation
and objective conditions, the following describes the tools and methods of Home position calibration, as
well as some common problems and methods to solve these problems.
1) Software Home position Calibration
The laser tracker needs to be used to establish the coordinate system of each joint of the robot, and the
system encoder's reading is set to zero. The software calibration is more complicated and needs to be
operated by professionals of our company.
2) Mechanical Home position Calibration (Line Calibration)
Rotate the marking line of the zero block to the fully aligned state, that is, the zero point.
4.6.2 Mechanical Home Position Calibration of Each Axis
When re-calibrating the mechanical zero point of each axis of the robot, operate the robot in the jog
mode to make each axis of the robot run to the zero mark alignment position of each axis, and then enter
the zero information interface of the robot teaching box to record the coordinates of each axis. For the
specific home position calibration method, please refer to the "C30 Series Robot Operation Manual"
provided by our company.
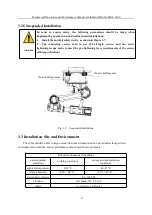
The mechanical home position distribution of each axis is as follows:
1
2
J1home
position
J2 home
position




































































