





























36
Form E-564
Eastman
®
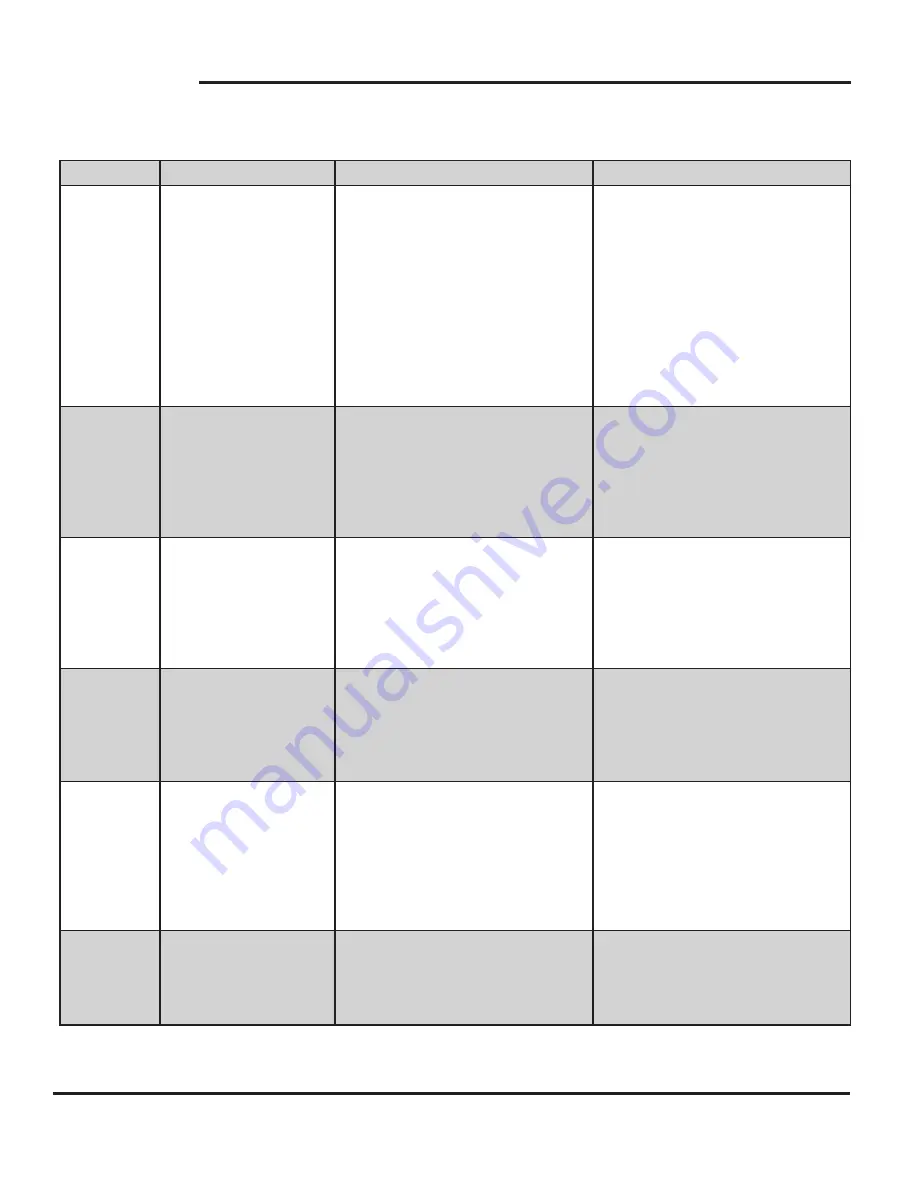
Fault
Message/Warning
Cause
Remedy
n151
Not enough distance to
move; motion exception.
For trapezoidal and customer table
motion tasks: The target velocity
specified in the motion task cannot
be reached via using the selected
acceleration and deceleration since
the distance to travel is not sufficient.
For a 1:1 profile: The selected ac
-
celeration and deceleration will be
extended since there is too much
distance to travel and the motion
task would exceed its maximum al-
lowed velocity.
Activation of any new motion or us-
ing of DRV.CLRFAULTS will clear
the warning. Check motion task set-
tings and parameters to make sure
that the values entered will produce
a valid motion task.
n152
Not enough distance to
move; following motion
exception.
A new motion task activated, when
one motion task is already active
and the target position specified in
the motion task parameters cannot
be reached with specified target ve
-
locity, acceleration and deceleration
parameters.
Activation of any new motion or us-
ing of DRV.CLRFAULTS will clear
the warning. Check motion task tar-
get velocity settings and parameters
to make sure that the values entered
will produce a valid motion task.
n153
Velocity limit violation,
exceeding max limit.
A new target velocity calculated
internally due to an exception, and
is being limited due to user velocity
limit.
Activation of any new motion or us-
ing of DRV.CLRFAULTS will clear
the warning. Check motion task tar-
get velocity settings and parameters
to make sure that the values entered
will not exceed the VL.LIMITP and
VL.LIMITN setting.
n154
Following motion failed;
check motion param-
eters.
Activation of the following motion
task failed due to incompatible
parameters, or motion task does not
exist.
Activation of any new motion or us-
ing of DRV.CLRFAULTS will clear
the warning. Check the following
motion task settings and parameters
to make sure that the values entered
will produce valid.
n156
Target position crossed
due to stop command.
The motion crosses the target posi-
tion after triggering a DRV.STOP
command. This situation can happen
when processing a change-on-the-fly
motion task and triggering a DRV.
STOP command close to the target
position of the currently running mo-
tion task.
Activation of any new motion or us-
ing of DRV.CLRFAULTS will clear
the warning.
n157
Homing index pulse not
found.
A homing mode with index detection
of activated, and index pulse is not
detected while moving across the
range determined by the hardware
limit switches.
Activation of any new motion or us-
ing of DRV.CLRFAULTS will clear
the warning.







































































