





























Digital Dream Standalone Motion Controller
DDCS-Expert Users Manual
Page-54
Firstly no forget to go to IO page to configurate right ports for the X / Y / Z / 4th / 5th axis, and
wire them correctly. Then we can start to Home.
There are many Parameters related to the Home function, we need to understand them and
try to set each parameters correctly for our own usage.
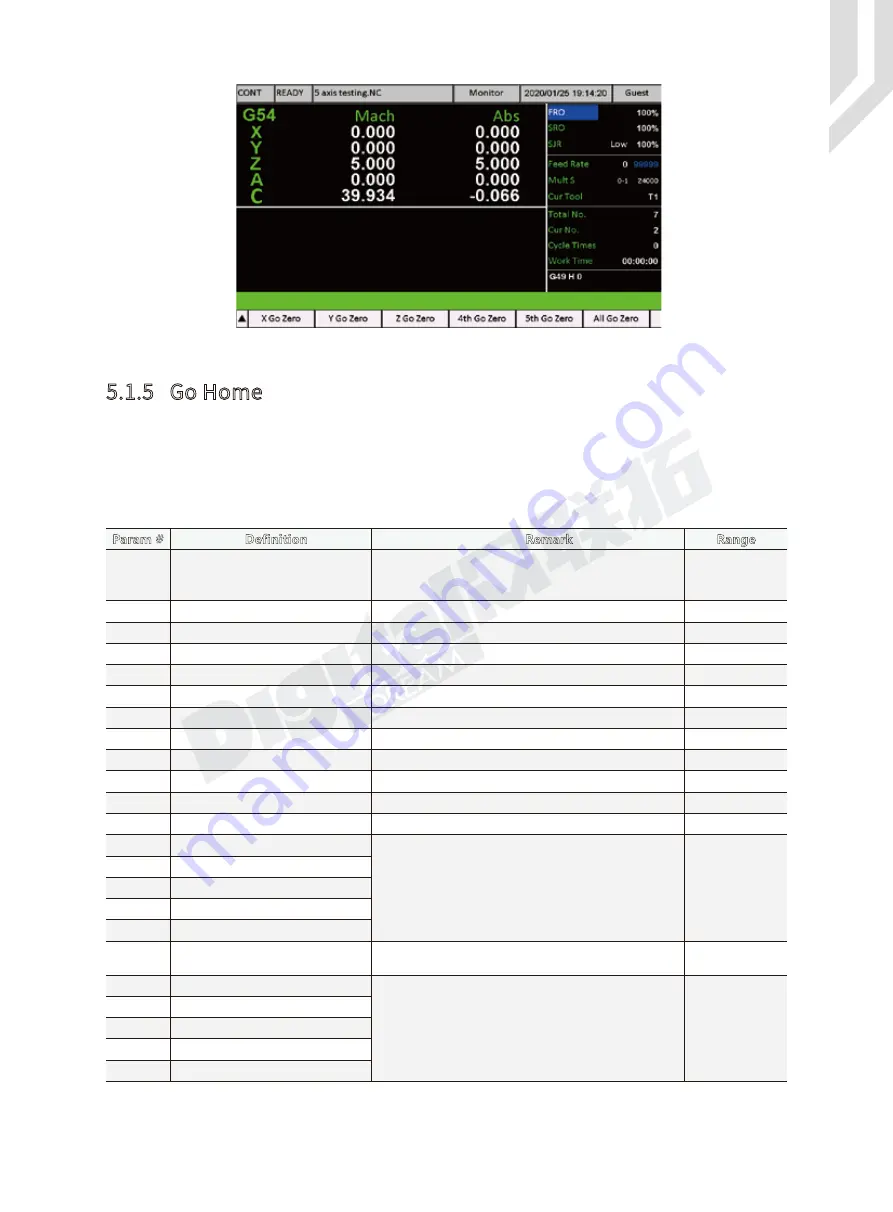
Figure 5-58 All axis Go Zero
5.1.5 Go Home
Param #
Definition
Remark
Range
There are two mode of Home Mode, Here we only
introduce Swtich Mode. If the users need Absolute
mode, please contact our engineer to configurate.
#100
#106
#107
#112
#113
#114
#115
#116
#122
#123
#124
#125
#126
#127
#235
#236
#237
#238
#239
Home mode
Switch/Absolute
-999~999mm
Homing cycle count
1~5
Detection Times of Home action
X-axis homing speed
99~99999 mm/min
X-axis initial speed when Home
#108
Y-axis homing speed
99~99999 mm/min
Y-axis initial speed when Home
#109
Z-axis homing speed
99~99999 mm/min
Z-axis initial speed when Home
#110
4th-axis homing speed
99~99999 mm/min
4th-axis initial speed when Home
#111
5th-axis homing speed
99~99999 mm/min
5th-axis initial speed when Home
The movement direction when Home of X-axis
The movement direction when Home of Y-axis
The movement direction when Home of Z-axis
The movement direction when Home of 4th-axis
The movement direction when Home of 5th-axis
X / Y / Z / 4th / 5th-axis Position in Mach Coordinate
after Home. After all axis finished Homing,they will
move to the according position we set here.
The values are in Mach coordinate.
Yes/No
Whether pop-up a dialog box to ask if Go Home when
Power On the Controller.
X-axis homing direction
Negative/Positive
Negative/Positive
Negative/Positive
Negative/Positive
Negative/Positive
Y-axis homing direction
Z-axis homing direction
4th-axis homing direction
5th-axis homing direction
Mach position after X go home
Mach position after Y go home
Mach position after Z go home
Mach position after 4th go home
-999~999mm
Mach position after 5th go home
Home after booting
X-axis Mach zero offset
We can reduce the error made by machine struction
or any other factors by setting the offset for each axis.
Y-axis Mach zero offset
Z-axis Mach zero offset
4th-axis Mach zero offset
5th-axis Mach zero offset







































































