





























AMT58x-EC EtherCAT®
31
6.1.1 Data transfer
Usually, in a data bus system, Master controller sends online a data
request and then waits for data to be processed and sent back from
each Slave node; this does not comply with a real-time system
because Master receives data from Slaves in different moments and
the whole system cannot be synchronized.
In EtherCAT the real-time characteristic of the system is quite
improved because data are processed “on-the-fly”, using one single
frame to acquire all data from all Slaves.
In fact the frame sent by the Master is read by each Slave node data
is addressed to while the telegram passes through the device;
similarly, input data is inserted while the telegram passes through.
Then the telegram is forwarded to the next device. Telegrams are
only delayed by a few nanoseconds.
The last Slave issues back the complete frame to the Master with all
the requested data (again passing through all the Slaves).
This efficient data flow is guaranteed by the 100BASE-TX full-duplex
structure of EtherCAT bus which is fitted with two separated lines for
transmitting and receiving data.
Moreover the protocols exchange takes place inside the hardware
and it is thus independent from CPU and software processing.
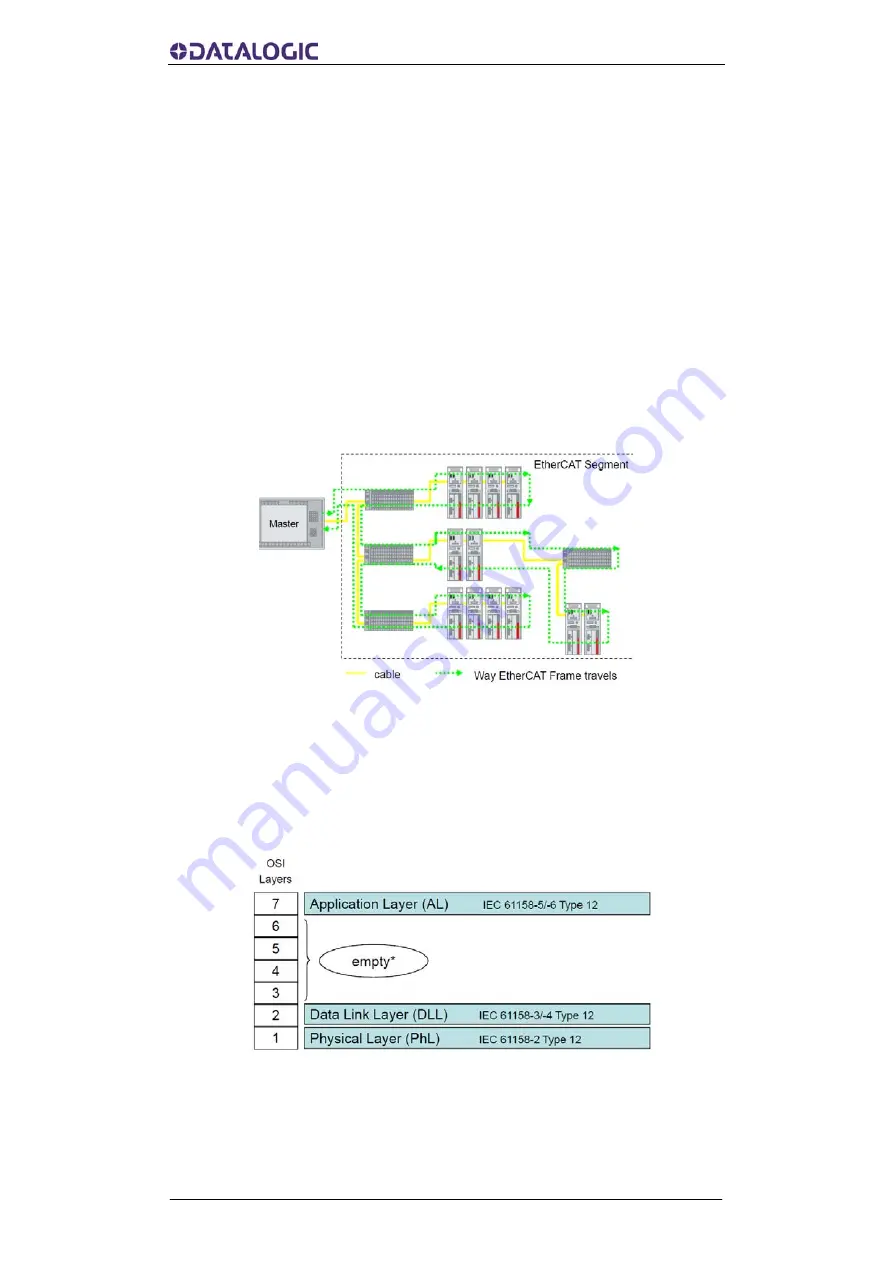
6.1.2 ISO/OSI Layer model
* “empty” means that the layer behaviour exists, but is not shown
explicitly.
Buy: www.ValinOnline.com | Phone 844-385-3099 | Email: [email protected]