


























Xenus Plus Compact STO Manual
16-01553 Rev 00
Copley Controls
Page 12 of 31
6.0 STO Architecture and Function
The
Xenus Plus Compact
STO function is suitable for use in safety loops up to SIL 3 and/or Cat. 3 PL d
performance. The circuit concept uses a quasi three-channel architecture so that the safety function will
continue to operate even in the event of two failures. This architecture is shown in the system block diagram
below.
In the Safe State, the drive will not produce torque or force in the motor. The STO function achieves and
maintains a safe state by disabling the ability of the attached motor to produce torque/force. This both halts any
drive induced acceleration already in process and prevents initiation of motion. The expectation is that an
inability of the motor to produce torque/force translates into a reduction of risk of hazardous motion for the larger
system.
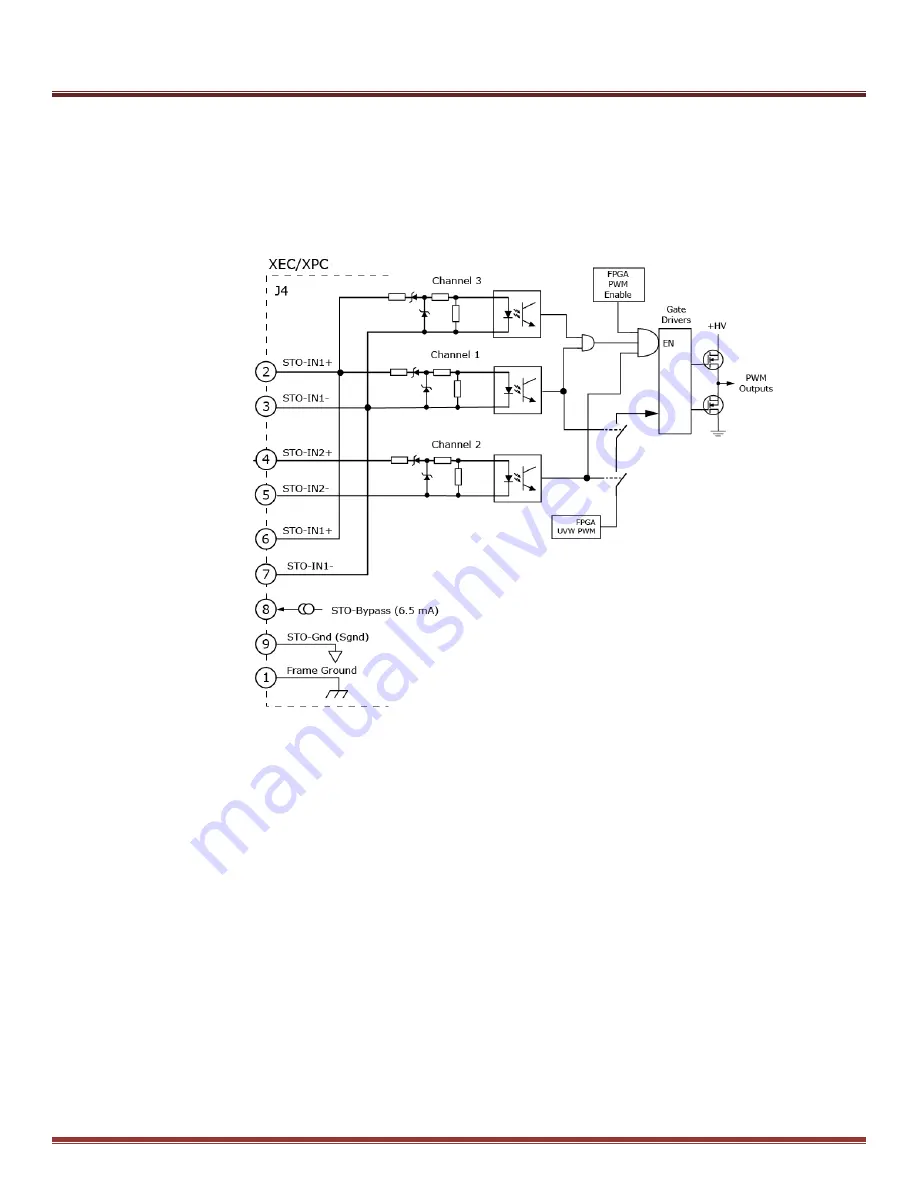
The STO circuit concept involves disabling the ability of the motor drive output stages to produce current. The
PWM outputs consists of three UVW totem-pole outputs, each composed of upper and lower IGBT devices.
The UVW PWM signals go to gate-drivers that control the upper and lower devices, producing current in the
motor windings which in turn can produce motion. STO channels 1 & 2 can cut-off the UVW PWM signals to the
gate drivers as a group.
Fig. 2





















































