















C100E EtherCAT AC Servo Drive
www.coolmay.com
92
Scaling Factor
:
The distance corresponding to the encoder pulse for each
position feedback. For example, if the motor rotates a roll with 1,311,072
pulses, and if the motor rotates a roll for 1 mm, the ScalingFactor is
1/131072=0.00000762939453125 mm/Inc.
Tip: for no-load debugging, it is customary to set a roll to 60mm, so that
the speed of 1mm/s is equivalent to 1 lap / min. Because the rated speed unit
of the motor is rpm, debugging with rpm as the speed unit is more intuitive. So
the quantitative factor is set to: 60 /131072.
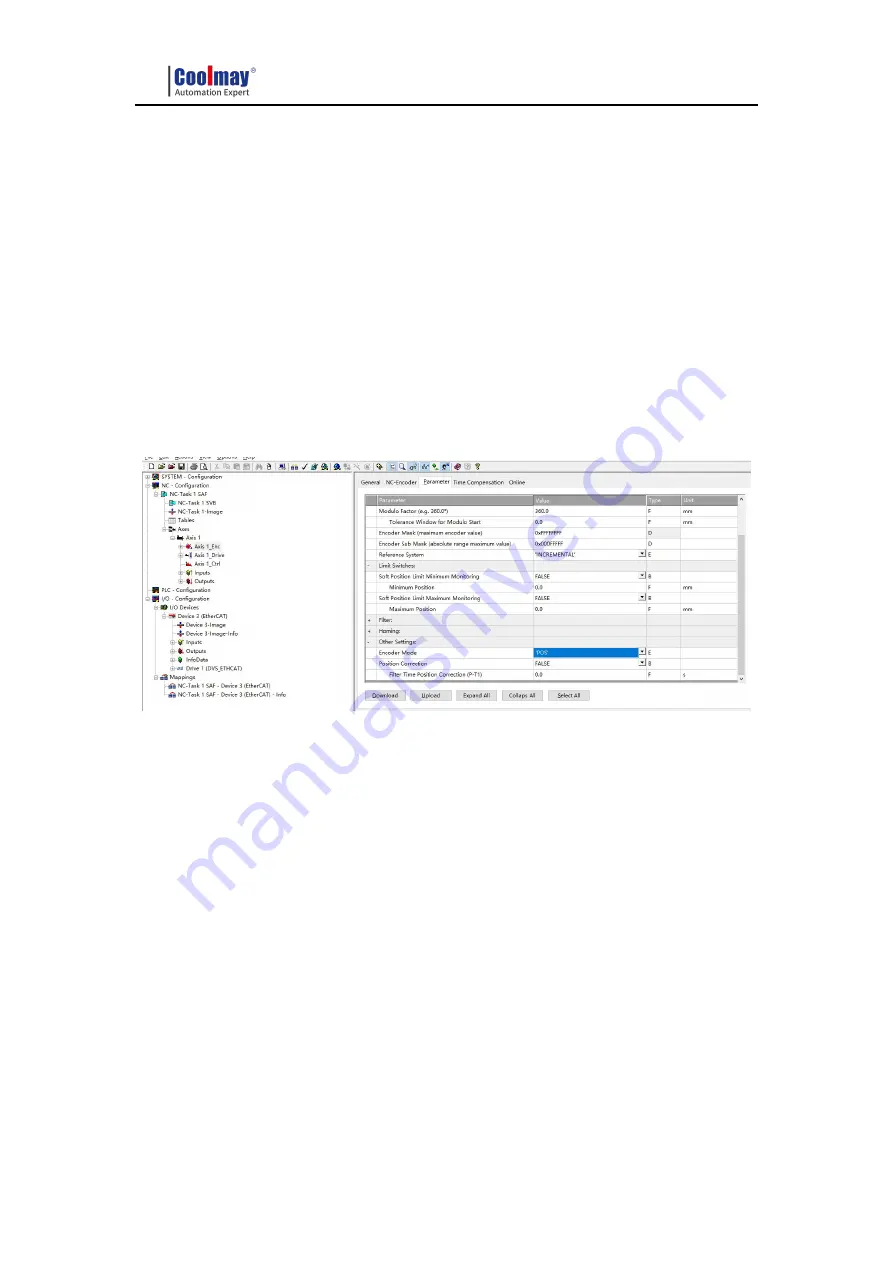
c
)
Set encoder feedback mode to pos.
Other settings
:
Encoder mode and there are three options:
Pos: The encoder is only used to calculate the position and is used when
the position loop is in the drive.
PosVelo: The encoder is only used to calculate position and speed when
the position ring is used in TWinCAT NC.
PosVeloAcc: TWinCAT NC uses encoders to determine position, speed
and acceleration.
Pos
:
The upper computer is only responsible for sending the position
instruction. The servo runs in the periodic synchronous position mode (6060
=8), and the position loop is calculated internally.







































































