












Benezan Electronics
Hard- and software development
Triple Beast Installation Guide
Nicolas Benezan, Stauffenbergstr. 26, 72108 Rottenburg
Phone: +49 (0) 7457/946365 0 benezan-electronics.de
Page
TripleBeast-NET Installation.docx22.09.2020
The step and direction signals for a maximum of 4 axes are automatically assigned to the three motors and the RJ45 socket. No
settings need to be made for this. In particular, there is no need to set a pulse time, as the step signal always has a 50% duty cycle.
The direction of movement can be reversed in the machine parameters (Menu -> Configuration -> Machine) on the "Axis
Parameters" page with the "Inverted direction" button.
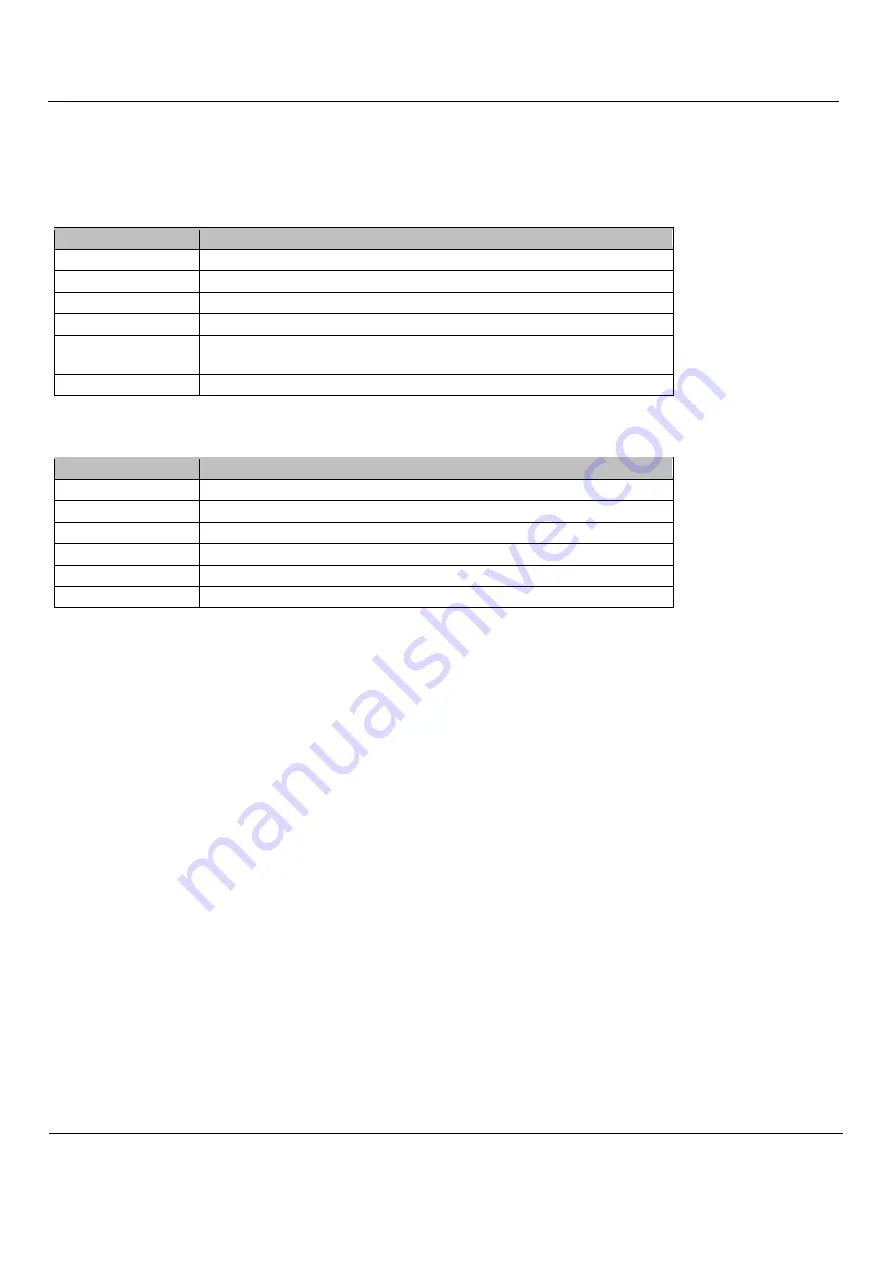
For the assignment of the signals switch to the page "Inputs/Outputs". The following input signals are available and can be
assigned to the logical signals (left table in the software):
Pin Name
Signal Description
Input 1
Switch input no. 1 (terminal X3.2)
Input 2
Switch input no. 2 (terminal X3.4)
Input 3
Switch input no. 3 (terminal X3.6)
Input 4
Switch input no. 4 (terminal X3.8)
Emergency stop
Emergency stop (triggered by mushroom button terminal X2.6, undervoltage
or connection error)
D error
Drive error, one of the stepper motor or servo output stages reports error
Input signals can be used multiple times if required. For example, the same switch input can be used simultaneously as a
reference and limit switch.
The following output signals are available and can be assigned to the logical signals (in the software right table):
Pin Name
Signal Description
Release
Current reduction signal or servo enable to the output stages
Relay 1
Relay no. 1, contacts X4.3 and X4.4
Relay 2
Relay no. 2, contacts X4.5 and X4.6
Brake
Relay for holding brake or frequency converter start, terminal X2.2
PWM
PWM signal for analog output, terminal X2.4
WDog
Watchdog/Charge-Pump-Signal, switches all outputs free
Unlike inputs, output signals cannot be inverted (active low/hi) because otherwise the safe off state would not be defined. For
the function of all other outputs the charge pump signal must be assigned to pin "WDog". Otherwise all outputs, including the step
signals, are disabled.
When using stepper motor output stages, the current reduction signal must be applied to the enable pin. This is always active
when all drives are stopped. When using servos, however, the servo enable signal must be assigned to the enable pin. This is
active when the drives are moving.
The relays can be assigned to any other output signals. Examples:
Standard assignment: Relay 1 = spindle forward, relay 2 = coolant, brake = holding brake
no brake, FU, add. spray cooling: relay1 = coolant, relay2 = spray cooling, brake = spindle forward
Spindle with right/left rotation: relay1 = spindle forward, relay2 = spindle reverse
If the number of available outputs or inputs is not sufficient for the application, they can be increased with an expansion
module.





















































