





























Commissioning
EL33xx-00x0
116
Version: 4.2
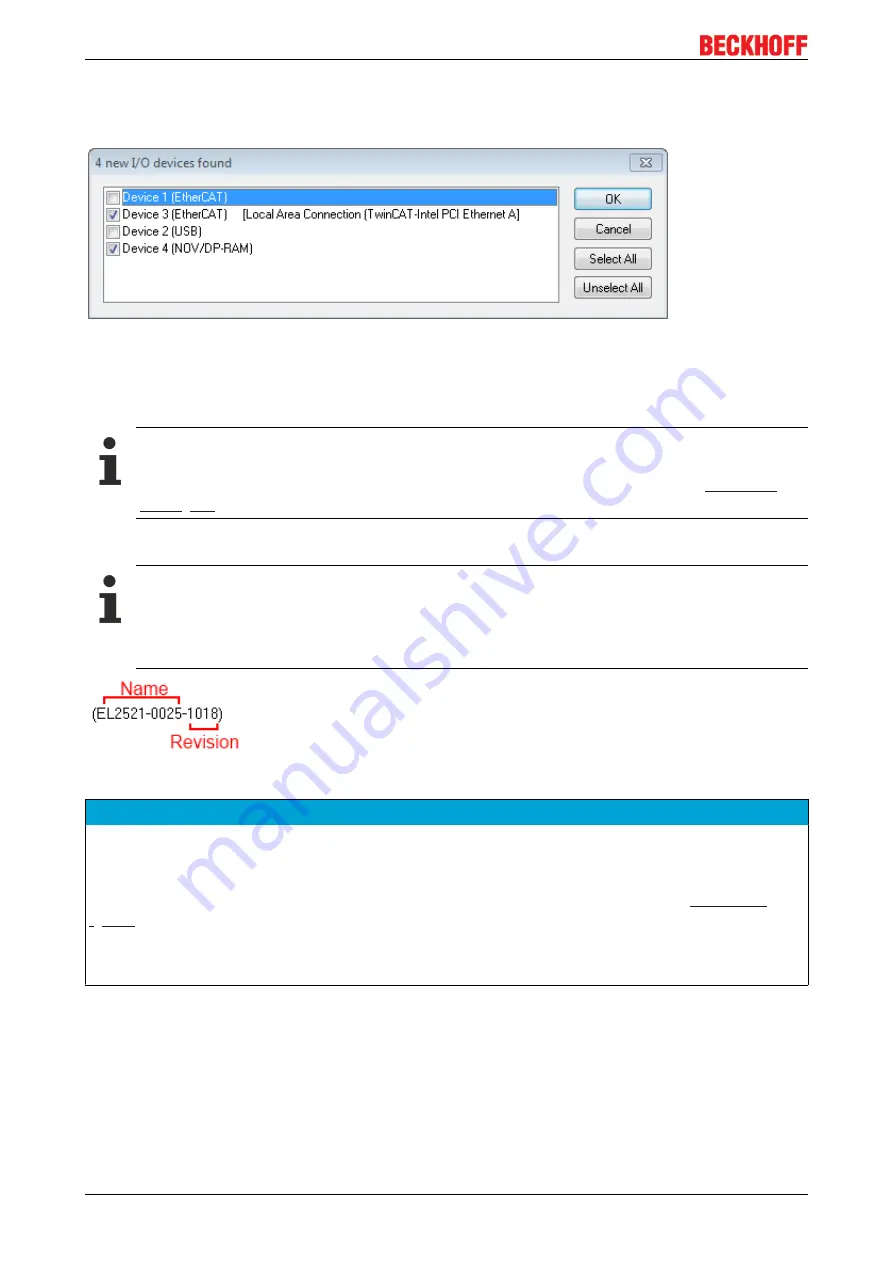
Ethernet ports with installed TwinCAT real-time driver are shown as “RT Ethernet” devices. An EtherCAT
frame is sent to these ports for testing purposes. If the scan agent detects from the response that an
EtherCAT slave is connected, the port is immediately shown as an “EtherCAT Device” .
Fig. 123:
Detected Ethernet devices
Via respective checkboxes devices can be selected (as illustrated in Fig. “
Detected Ethernet devices
” e.g.
Device 3 and Device 4 were chosen). After confirmation with “OK” a device scan is suggested for all selected
devices, see Fig.: “
Scan query after automatic creation of an EtherCAT device”
.
Selecting the Ethernet port
Ethernet ports can only be selected for EtherCAT devices for which the TwinCAT real-time driver is
installed. This has to be done separately for each port. Please refer to the respective
Detecting/Scanning the EtherCAT devices
Online scan functionality
During a scan the master queries the identity information of the EtherCAT slaves from the slave
EEPROM. The name and revision are used for determining the type. The respective devices are lo-
cated in the stored ESI data and integrated in the configuration tree in the default state defined
there.
Fig. 124:
Example default state
NOTE
Slave scanning in practice in series machine production
The scanning function should be used with care. It is a practical and fast tool for creating an initial configu-
ration as a basis for commissioning. In series machine production or reproduction of the plant, however, the
function should no longer be used for the creation of the configuration, but if necessary for
version of the delivered products for product maintenance reasons, a configuration can be created by such
a scan which (with an identical machine construction) is identical according to the device list; however, the
respective device revision may differ from the initial configuration.
Example:
Company A builds the prototype of a machine B, which is to be produced in series later on. To do this the
prototype is built, a scan of the IO devices is performed in TwinCAT and the initial configuration ‘B.tsm’ is
created. The EL2521-0025 EtherCAT terminal with the revision 1018 is located somewhere. It is thus built
into the TwinCAT configuration in this way:
Содержание EL33-00 Series
Страница 2: ......
Страница 6: ...Table of contents EL33xx 00x0 6 Version 4 2...
Страница 17: ...Product overview EL33xx 00x0 17 Version 4 2 Fig 10 EL3312 Fig 11 EL3314...
Страница 18: ...Product overview EL33xx 00x0 18 Version 4 2 Fig 12 EL3314 0002 Fig 13 EL3314 0010...
Страница 60: ...Mounting and wiring EL33xx 00x0 60 Version 4 2 4 12 3 EL3314 EL3314 00xx LEDs Fig 43 EL3314 Fig 44 EL3314 0002...
Страница 61: ...Mounting and wiring EL33xx 00x0 61 Version 4 2 Fig 45 EL3314 0010 Fig 46 EL3314 0090...
Страница 66: ...Mounting and wiring EL33xx 00x0 66 Version 4 2 4 13 3 EL3314 00x0 Connection Fig 50 EL3314 Fig 51 EL3314 0002...
Страница 103: ...Commissioning EL33xx 00x0 103 Version 4 2 Fig 100 Incorrect driver settings for the Ethernet port...
Страница 114: ...Commissioning EL33xx 00x0 114 Version 4 2 Fig 119 EtherCAT terminal in the TwinCAT tree left TwinCAT 2 right TwinCAT 3...







































































