





























Parameterization and commissioning
CX8050, CX8051 - Embedded-PCs for
CANopen and CAN
42
Version: 1.4
cases where data in the PDO are unchanged, since attention is drawn to the fact that new telegram with old
data has arrived. This can be used for monitoring or to check whether a device still sends data on a regular
basis.
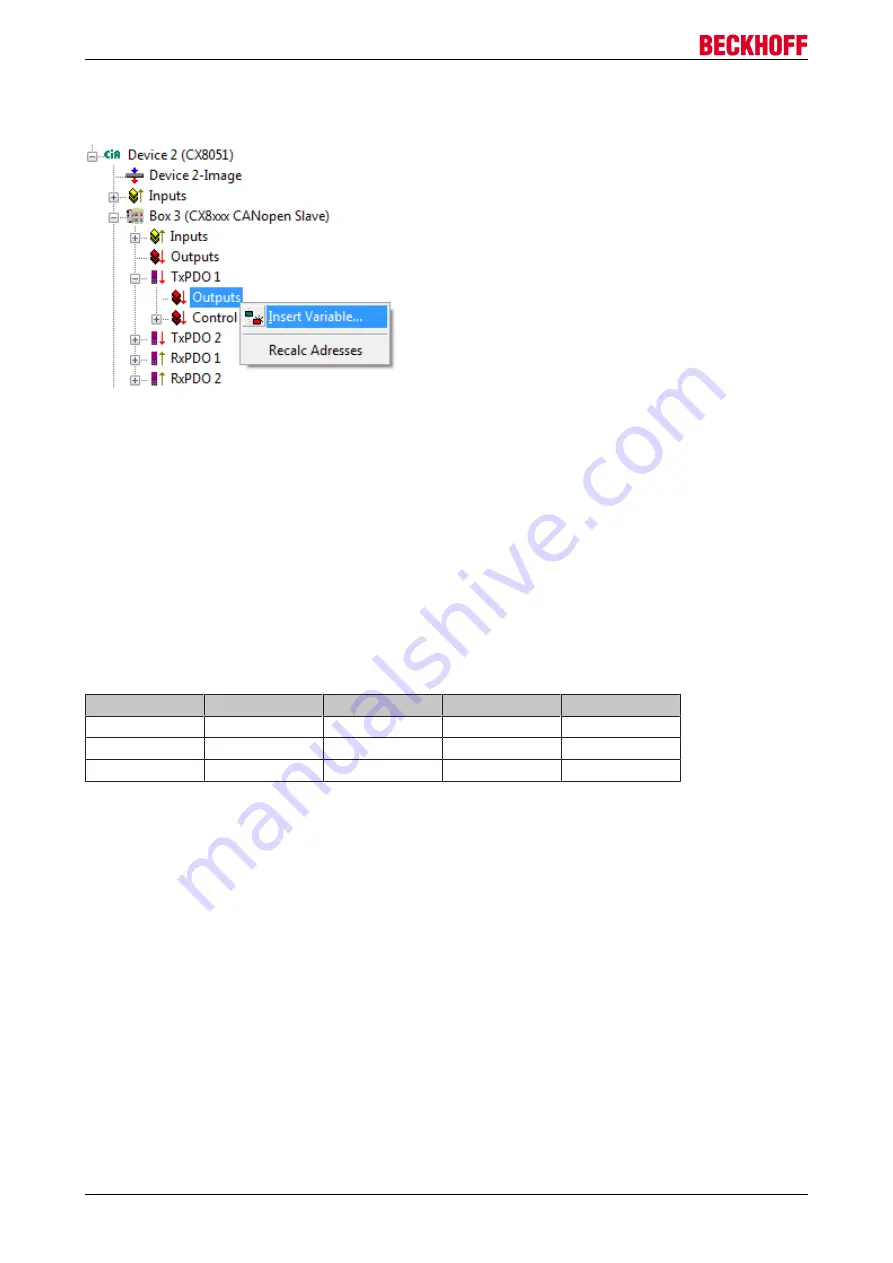
Further PDOs can be added by clicking on the "CX8xxx CANopenSlave box". Please note that the COB ID is
always zero from the 5th PDO, in which case it has to be entered manually.
CAN load
The CAN load should be taken into account during network planning and configuration: 500 kbit at 8 bytes of
user data per frame results in a maximum number of 3707 frames per second. For reasons of network
stability it is never advisable to run a CAN at 100% load. An upper bus load limit of 60% is recommended,
which corresponds to 2221 frames per second. Example: A CX8051 with 8 Rx PDOs and 10 ms task time,
resulting in 100 cycles per second for 8 PDOs. If PDO sending is event-driven, they are sent when the
process data change. On the slave side this may be more frequent than every 10 ms. If the values only
change once per 10 ms cycle, this results in 800 frames per second on the slave side and perhaps another
800 frames per second on the master side, plus heartbeat, sync telegrams and SDO communication. The
example indicates that the upper limit of 2221 frames can be reached or indeed exceeded quite quickly in
cases where rapid changes in input data lead to sending of PDOs with high frequency. This may be the case
for analog inputs, for example, since their values usually change continuously. It is therefore advisable to
control the send behavior by setting suitable parameter (inhibit time, filters) or to switch to cyclic sending.
Baud rate
1 bytes data
2 bytes data
4 bytes data
8 bytes data
1 Mbaud
15384
13333
10526
7407
500 kbaud
7692
6666
5263
3703
100 kbaud
1538
1333
1052
740
Table showing the number of theoretical CAN frames at 100% load for different CAN data sizes.
Virtual CANopen device interface
The virtual slave interface enables the creation of up to three virtual slaves on the same hardware interface.
This enables the user to exchange more data with a CANopen master.
A maximum of 16 PDOs data can be configured for each slave, i.e. in total you can exchange 4 x 16 PDOs
data in each direction.
Append a maximum of four CX8051 devices to your CAN device (fig. 1.0). Each of these devices is given a
CAN address via the System Manager which can also be linked with the address selector (see Address
switch). Add the process data PDOs under the box. For the CANopen master configure each of the four
slaves like an independent device.
Содержание CX8050
Страница 2: ......







































































