

















BTL5-S1_ _-M_ _ _ _-P-S32/S147/KA_ _
Micropulse Linear Transducer in Profile Housing
3
english
2.1
Characteristics
Micropulse transducers feature:
–
High data security: Output data
are checked for validity and plau-
sibility in the µC
–
Very high resolution, repeatability
and linearity
–
Measurement range monitoring
with "Out of Range" Bit 2
21
–
Immunity to shock, vibration, and
contamination
–
An absolute output signal
–
Wear- and maintenance-free
–
BTL to processor cable lengths
up to 400 m
–
IP 67 per IEC 60529
2.2
Function
The Micropulse transducer contains
a waveguide enclosed by an ex-
truded aluminum housing. A mag-
net attached to the moving mem-
ber of the machine is moved
across the top of the housing and
its position constantly updated.
The magnet defines the measured
position on the waveguide. An
internally generated INIT pulse
interacts with the magnetic field of
the magnet to generate a magneto-
strictive torsional wave in the
waveguide which propagates at
ultrasonic speed.
The torsional wave arriving at the
end of the waveguide is absorbed in
the damping zone. The wave arriv-
ing at the beginning of the wave-
guide creates an electrical signal in
the coil surrounding the waveguide.
The corresponding value is output
as synchronous serial data (SSI) via
the RS 485/422 interface. This
takes place with high precision
and repeatability within the mea-
suring range indicated as the
nominal stroke length.
On both ends of the nominal
stroke length is an area which pro-
vides an unreliable signal, but
which may be entered.
The electrical connection between
the transducer, the processor/con-
troller and the power supply is via a
cable, which is connected using a
female connector.
2
Function and Characteristics
Dimensions for installing the
Micropulse transducer and for the
magnets and control arm are found
on
➥
➥
➥
➥
➥
page 5.
2.3
SSI interface
Depending on the BTL version, the
SSI interface uses 24 or 25 bits
and the position values are trans-
mitted in Gray or binary code.
Transmission of the position values
is finished in time t
m
. The max.
clock frequency t depends on the
cable length
➥
➥
➥
➥
➥
section 8 Technical
Data on page 9.
Bit 2
21
can be used as an "Out-of-
Range" message, see Figs. 2-1
and 2-2.
Sending of the position values is
finished within time t
m
. It is started
with the falling edge of the last
clock pulse. After this time the
BTL is ready for the next data
transmission.
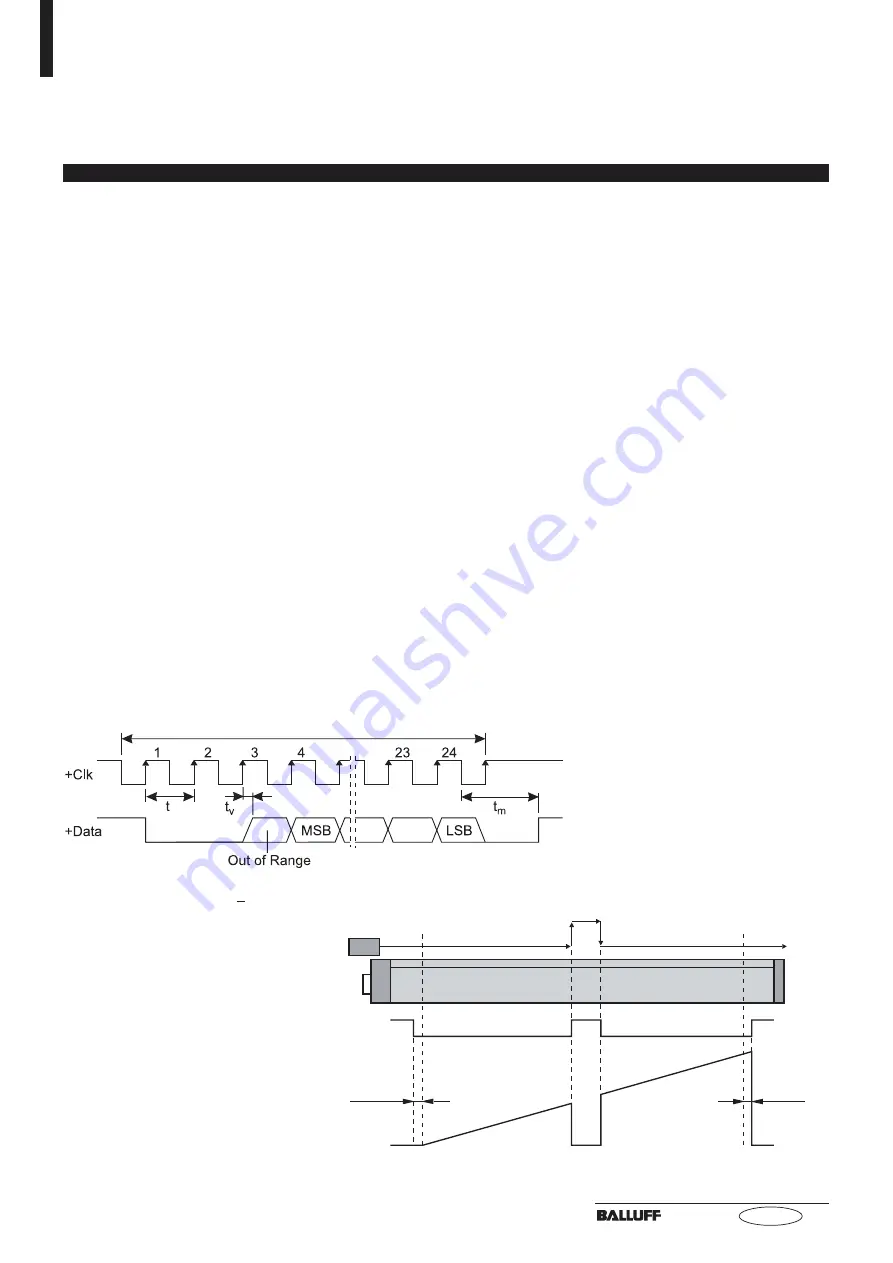
Clock sequence
t < t
m
t
v
= 150 ns
measured with 1 m cable
t
m
= 31 µs
independent of the clock
frequency
The time tm starts with the falling edge of
the last clock impulse (bit 24 or bit 25
depending on the version).
Fig. 2-1: Pulse diagram, example with 24 bit coding
➀
only by an resolution of > 5 µm
Fig. 2-2: Output data shown with "Out of Range" situation
Position of magnet:
1) out of the measurement range
2) within the measurement range
3) magnet not present
"Out of Range" Bit 2
21
will be set
after the occurence of the event.
Value of the output data 2
0
... 2
20
:
1a) 0
1b) max. at end point + 10 mm
2) proportional to distance
3) 0
Technical data are valid within the
measurement range only, i.e. between
null and end point.
1a
2
3
2
1b
~10 mm
~10 mm
Bit 2
21
Bit 2
0
... 2
20
Null point
End point
➀