




















6
AXOR Industries
Service Manual
MiniMagnum
TM
ver.1 rev.05/'15
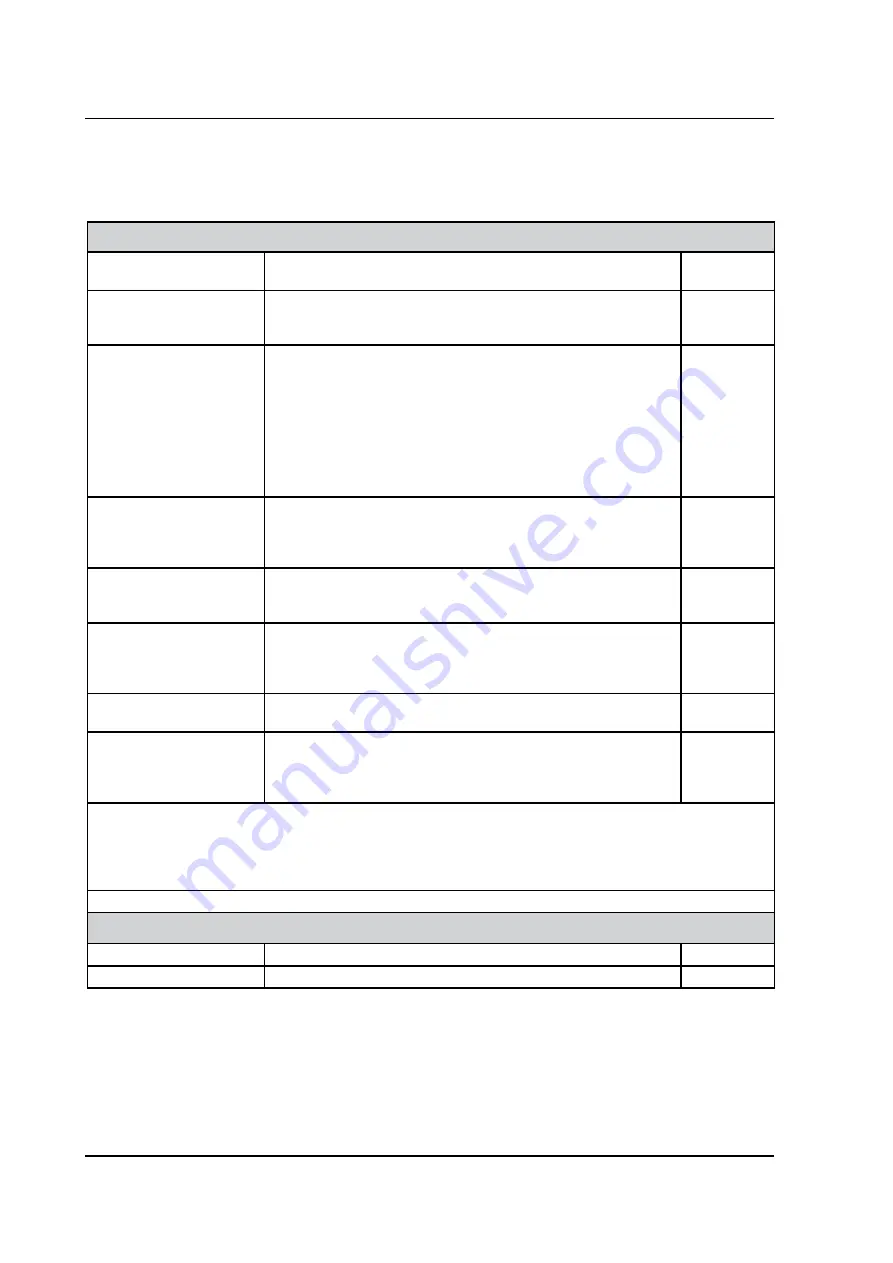
1.1 Description
opeRaTive modes
speed coNTRol
It is
speed piloting
utilising a digital reference or an
analogue reference (differential or common mode).
standard
ToRque coNTRol
It is
torque piloting
utilising a digital reference or an
analogue reference. This function allows you to control the
current from the drive.
standard
posiTioN coNTRol
The positioner can be managed via hardware (by using the
digital inputs) or via RS232 (by using the Axor's
Speeder
One
interface or another ModBus Master). It supports
32
programmable position profiles
; a
single task
or a
sequence
of tasks
are permitted.
The
homing procedure
is implemented. It uses the signal
coming from the
homing sensor
and eventually the
zero
signal
of the encoder.
standard
elecTRical aXis
(geaRiNg)
It is possible to pilot the drive with the quadrature signals
of an emulated encoder from a Master drive or with the
quadrature signals of an incremental encoder from a Master
motor (
electrical axis
or Gearing).
optional
pulse/diRecTioN
It is possible to connect the drive to a
stepper-motor
controller
, piloting it with the +/-Pulse and +/-Dir signals
(Pulse/Dir Mode).
optional
mulTidRop Rs232
It can work in
multidrop
, where the first drive, connected
via RS232 to the Master PC, is piloted with
ModBus
communication
, while the other drives are piloted with the
duplication of commands using the
CanBus interface
.
optional
Rs485 iNTeRface
It is possible to communicate with two or more drives by
using the
Rs485 interface
.
optional
caNBus
It can be configured and controlled using
canBus
. It
supports the following
can open
protocols:
• part of the
ds301-v4.02
• part of the
dsp402-v2.0
optional
Notes
:
• The current controller is vectorial with sampling time of 62,5
µ
s.
The velocity and position loop both work with sampling time of 250
µ
s.
• The current commutation is sinusoidal.
feedBacK
eNcodeR
incremental encoder signals plus hall signals
standard
ResolveR
2, 4, 6, 8 pole
optional
The
minimagnum
TM
is a digital drive capable of piloting both rotary AC brushless motors and linear
motors, up to
7,5Nm
. It can be supplied by a 3-phase voltage equal to
110÷480vac
or
by a single
phase voltage equal to
110÷230vac
(The power supply has to be specified in the ordering code - see
"1.5 Product Plate and Ordering code").







































































