





























UMAX140610. LIN
– J1939 CAN Protocol Converter with PWM Output. Version 1
Page: 17-81
By default, the
“Control Source”
is setup to be
‘CAN Receive Message’.
In other
words, the output will response in a linear fashion to the corresponding CAN received command
data. The
“Control Source”
together with
“Control Number”
parameter determine which
signal is used to drive the output. For example, setting
“Control Source”
to
‘CAN Receive
Messa
ge’
and
“Control Number”
to
‘
1
’
will connect signal measured from CAN Receive 1 to
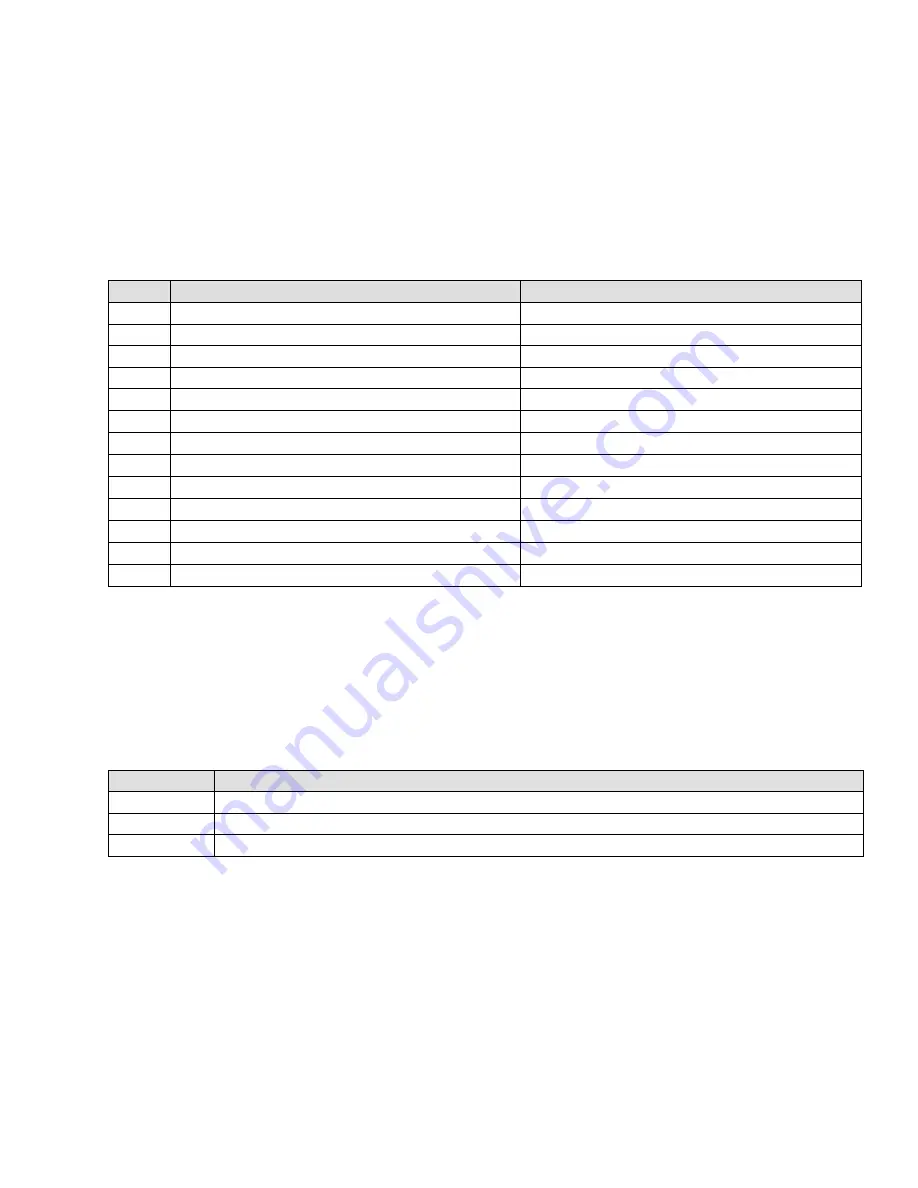
the output in question. The options for
“Control Sources”
and available
“Control Number”
are listed in the table below.
Table 8. Control Source Options
Value Meaning
Control Number Range
0
Control Not Used
[1]
1
CAN Receive Message
[1…10]
2
LIN Signal
[1…130]
3
LIN Slave Node Response Error
[1]
4
Constant Discrete Data
[1…5]
5
Constant Continuous Data
[1…5]
6
Lookup Table Block
[1…10]
7
Math Function Block
[1…4]
8
Programmable Logic Block
[1…3]
9
PWM Output Command
[1]
10
PWM Output Feedback
[1]
11
Power Supply Measured
[1]
12
Temperature Measured
[1]
In general, when the control input is within its range, output will respond in a linear fashion to
changes in the control source as the calculation in Figure 3 and when the control input is out of
range, output will respond with the minimum/maximum value in the output range. However, in
some cases it may be desired that the minimum offset not to be applied when the value is
outside of the range, i.e. when using a joystick profile with a deadband. For this reason,
setpoint “
Control Response
” has the options shown in the table below.
Table 9. Control Response Options
Value
Meaning
0
Single Output Profile
1
Off Below Control Minimum
2
Off Above Control Maximum
In addition to the Control input, the function block also supports an enable input which can be
setup as either an enable or disable signal.







































































