





























!
17
!
7.3
PID
P
roportional –
I
ntegral –
D
erivative controller (PID controller)
P
roportional –
I
ntegral –
D
erivative controller (PID controller)
A PID controller continuously calculates an error value e (t) as the difference between a
desired setpoint (SP) and a measured process variable (PV) and applies a correction
based on proportional, integral, and derivative terms (denoted P, I, and D respectively)
which give the controller its name.
Term
P
is proportional to the current value of the SP
−
PV error e(t). For example, if the
error is large and positive, the control output will be proportionately large and positive,
taking into account the gain factor "K". Using proportional control alone in a process with
compensation such as temperature control, will result in an error between the setpoint and
the actual process value, because it requires an error to generate the proportional
response. If there is no error, there is no corrective response.
Term
I
accounts for past values of the SP
−
PV error and integrates them over time to
produce the I term. For example, if there is a residual SP
−
PV error after the application of
proportional control, the integral term seeks to eliminate the residual error by adding a
control effect due to the historic cumulative value of the error. When the error is eliminated,
the integral term will cease to grow. This will result in the proportional effect diminishing as
the error decreases, but this is compensated for by the growing integral effect.
Term D is a best estimate of the future trend of the SP
−
PV error, based on its current rate
of change. It is sometimes called "anticipatory control", as it is effectively seeking to reduce
the effect of the SP
−
PV error by exerting a control influence generated by the rate of error
change. The more rapid the change, the greater the controlling or dampening effect.
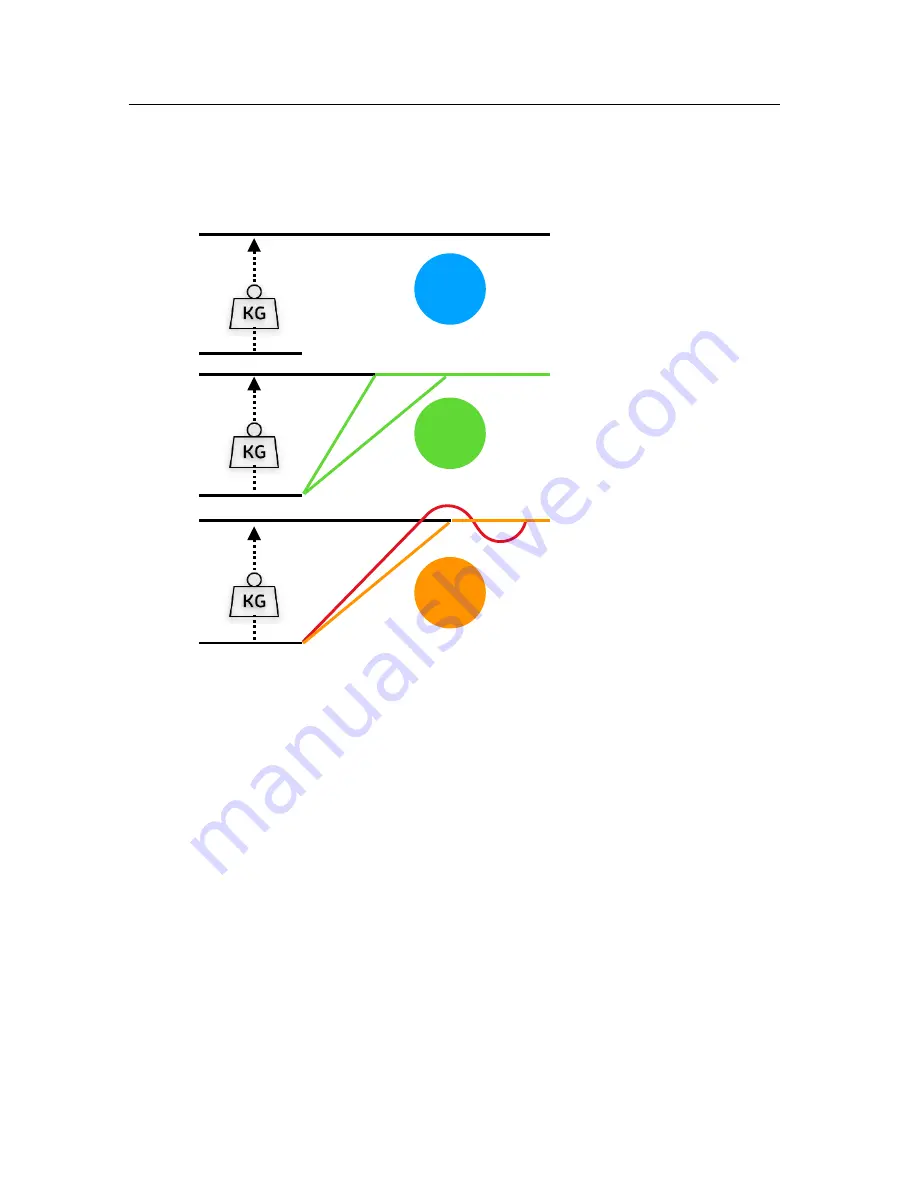
P
= Position
= Target Position
= Actual Position
Amount of power
needed to move
the camera
I
= Time
= Target Position
= Actual Position
Low value slow
High value fast
= Actual Position
D
= Power Limit
= Target Position
Cruise control
for the power
PID







































































