





























C
OMMAND
M
ODE
D
ATA
F
ORMAT
Networked Indexer/Driver User Manual
ADVANCED MICRO CONTROLS INC.
68
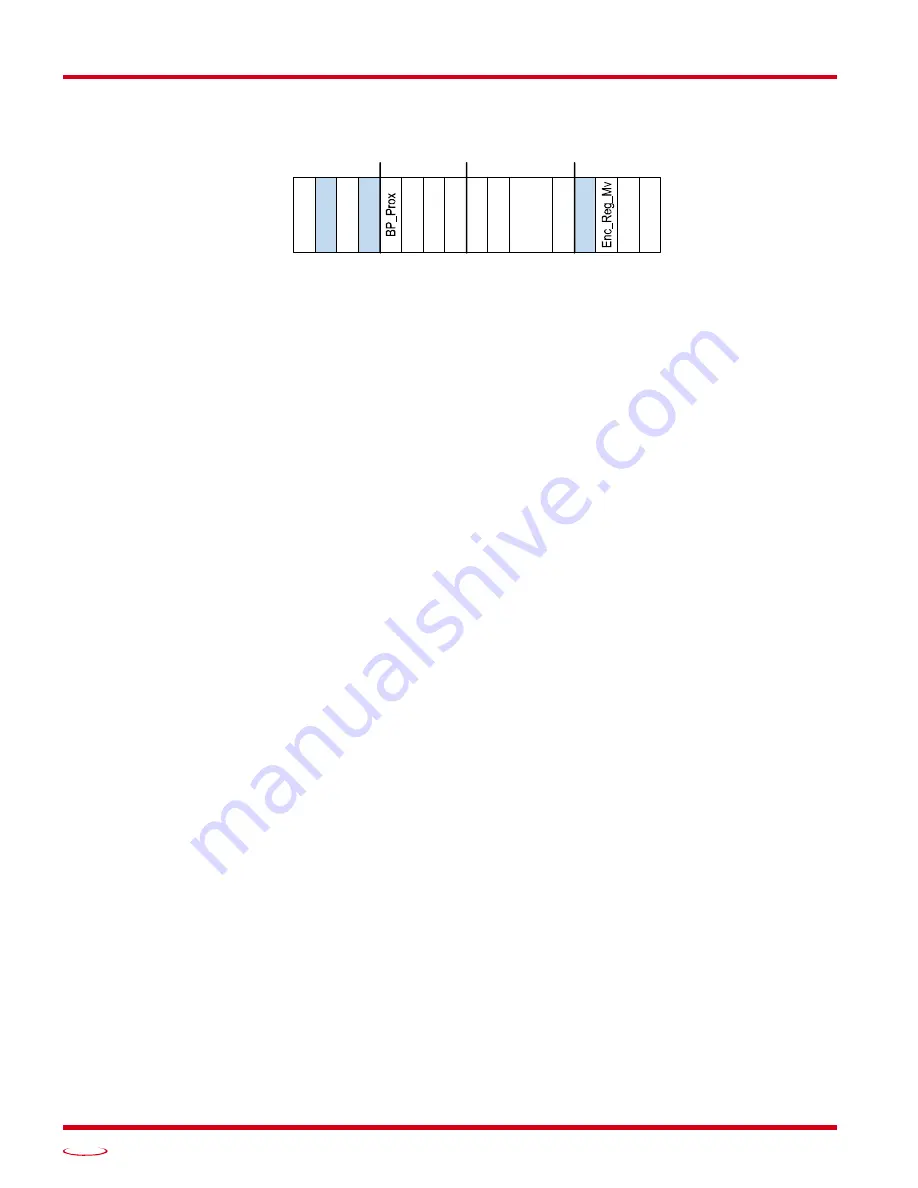
CMD_word1
Figure R7.3 CMD_word1 Format
Bit 15: Enable_Driver –
“0” to disable the motor current, “1” to enable motor current. A valid configura-
tion must be written to the Networked Driver before the driver can be enabled.
Bit 14: Reserved –
Must be set to “0”.
Bit 13: OUT1_Set_State –
When the output is configured as a general purpose output point instead of the
Fault Output, this bit controls the state of the output. When this bit equals a “1”, the output is on and
conducts current.
Bit 12: Reserved –
Must be set to “0”.
Bit 11: Backplace_Proximity_Bit –
When the Networked Driver is configured to use the
Backplace_Proximity_Bit, the unit will ignore the state of the Home Input as long as this bit equals
“0”. This bit must equal “1” before a transition on the Home Input can be used to home the machine.
Further information on using the Backplace_Proximity_Bit can be found in the
Bit 10: Clear_Driver_Fault –
If this bit is set when a Reset Errors Command is issued, (CMD_word0, Bit
10) the Networked Driver will attempt to clear driver errors such as a missing interlock jumper or
motor short fault. Note that the driver must be disabled (CMD_word1, Bit 15 = 0), when using this
command.
Bit 9:
Assembled_Move_Type –
When this bit equals “0”, a Blend Move is started when the Run Assem-
bled Move bit, (CMD_word1, Bit 13) makes a 0
1 transition. When this bit equals “1”, a Dwell
Move is started on the transition. The direction of a Blend Move is controlled by the
Reverse_Blend_Direction bit, (CMD_word1, Bit 4). In a Dwell Move, the Dwell Time between seg-
ments is programmed with the UINT Jerk register of the command data.
Bit 8: Indexed_Command –
If this bit is set when a move command is issued, the Networked Driver will
not run the move immediately, but will instead wait for an inactive-to-active transition on an input
configured as a
Start Indexer Move
input.
Bit 7:
Registration_Move –
When this bit equals “0”, and a Jog Move command is issued, it will run as a
standard Jog Move. When this bit equals “1” and a Jog Move command is issued, the move will run
as a Registration Move.
Bit 6: Enable_Electronic_Gearing –
Set to “1” to put the Networked Driver in Electronic Gearing mode.
Set to “0” for normal operation. A full description of Electronic Gearing mode starts on page 23.
Bit 5: Save_Assembled_to_Flash -
Set this bit to save the data of a programmed Assembled Move. This bit
is only acted upon this way when the Program_Assembled bit (CMD_word0, Bit 11 makes a 1
0
transition as explained in the
section of this manual starting on page
OR
Motor_Current_Key2 -
See
Description of Motor Current Keys
on the following page.
0
15 14 13 12 11 10 09 08 07 06
05 04 03 02 01 00
CMD_word1
En
_D
riv
er
O
U
T1_S
ta
te
En_
El
G
ear
R
eg
_M
ov
e
Inde
x_
Cm
d
AsM
v_
Ty
pe
C
lr_
D
rv
_F
lt
R
ev
_B
le
nd
Di
r
Cur
re
nt
_K
ey
0
Cur
re
nt
_K
ey
1
0
0
Sv
A_
to
_F
la
sh
or
Cur
ent
_K
ey
2
Содержание SD17060E-K
Страница 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S301...
Страница 20: ...UL CUL RECOGNIZED INSTALLATIONS Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 20 Notes...
Страница 40: ...MOTION CONTROL Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 40 Notes...
Страница 50: ...CALCULATING MOVE PROFILES Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 50 Notes...
Страница 56: ...HOMING AN AMCI NETWORKED DRIVER Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 56 Notes...
Страница 64: ...CONFIGURATION DATA FORMAT Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 64 Notes...
Страница 84: ...COMMAND MODE DATA FORMAT Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 84 Notes...
Страница 110: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC...







































































