





























20 Gear Drive, Plymouth Ind. Park, Terryville, CT 06786
Tel: (860) 585-1254 Fax: (860) 584-1973 http://www.amci.com
41
REFERENCE 4
C
ALCULATING
M
OVE
P
ROFILES
The equations in this reference use a unit of measure of steps/second/second (steps/second
2
) for acceleration
and deceleration. However, when programming the Networked Driver, all acceleration and deceleration val-
ues must be programmed in the unit of measure of steps/second/millisecond.
To convert from steps/second
2
to steps/second/millisecond, divide the value by 1000. This must be done
when converting from a value used in the equations to a value programmed into the Networked Driver.
To convert from steps/second/millisecond to steps/second
2
, multiply the value by 1000. This must be
done when converting from the value programmed into the Networked Driver to the value used in the
equations.
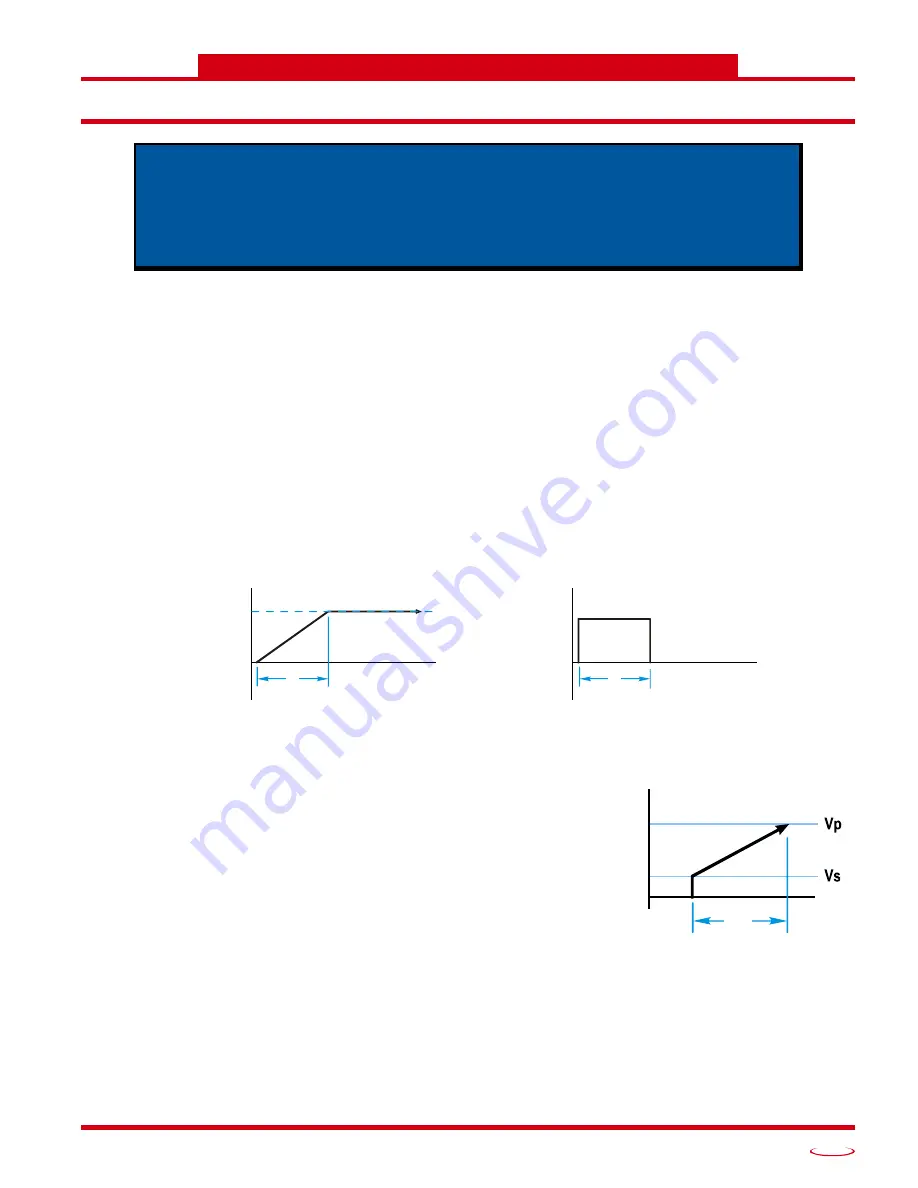
Constant Acceleration Equations
When you choose to use constant accelerations, the speed of the move will increase linearly towards the Pro-
grammed Speed. This is the fastest form of acceleration, resulting in the fastest move between two points at
its programmed speed. For the smoothest transition from the starting speed, the starting speed should be equal
to the square root of the acceleration in steps/sec
2
. For example, if the choose acceleration is 20,000 steps/
sec
2
, the smoothest transition occurs when the starting speed is 141. (141
2
20,000)
Figure R4.1 Constant Acceleration Curves
Variable Definitions
The following variables are used in these equations:
V
S
= Configured Starting Speed of the move
V
P
= Programmed Speed of the move
a
= Acceleration value. Must be in the units of steps/second
2
d
= Deceleration value. Must be in the units of steps/second
2
T
A
or T
D
= Time needed to complete the acceleration or
deceleration phase of the move
D
A
or D
D
= Number of Steps needed to complete the acceleration
or deceleration phase of the move
This reference was added because some of our customers must program very
precise profiles. Understanding this section is not necessary before programming
the Networked Driver and it can be considered optional. Two different approaches
are presented here. The constant acceleration example takes given parameters
and calculates the resulting profile. The variable acceleration example starts with
a desired speed profile and calculates the required parameters
SPEED
AC
C
E
L
E
R
A
TIO
N
TIME
TIME
t
t
Programmed
Speed
SP
E
E
D
TIME
Ta
Содержание SD17060E-K
Страница 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S301...
Страница 20: ...UL CUL RECOGNIZED INSTALLATIONS Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 20 Notes...
Страница 40: ...MOTION CONTROL Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 40 Notes...
Страница 50: ...CALCULATING MOVE PROFILES Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 50 Notes...
Страница 56: ...HOMING AN AMCI NETWORKED DRIVER Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 56 Notes...
Страница 64: ...CONFIGURATION DATA FORMAT Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 64 Notes...
Страница 84: ...COMMAND MODE DATA FORMAT Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 84 Notes...
Страница 110: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC...







































































