





























Geometries with orientation support
Chapter 4
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
201
The robots have geometrical configurations where typically the joint axes are not
orthogonal. The geometrical configurations are specified by coordinate system
type, such as Delta. The coordinate definition attribute further specifies how
many joint axes in the Robot coordinate system, such as J1,J2,J3,J6. This diagram
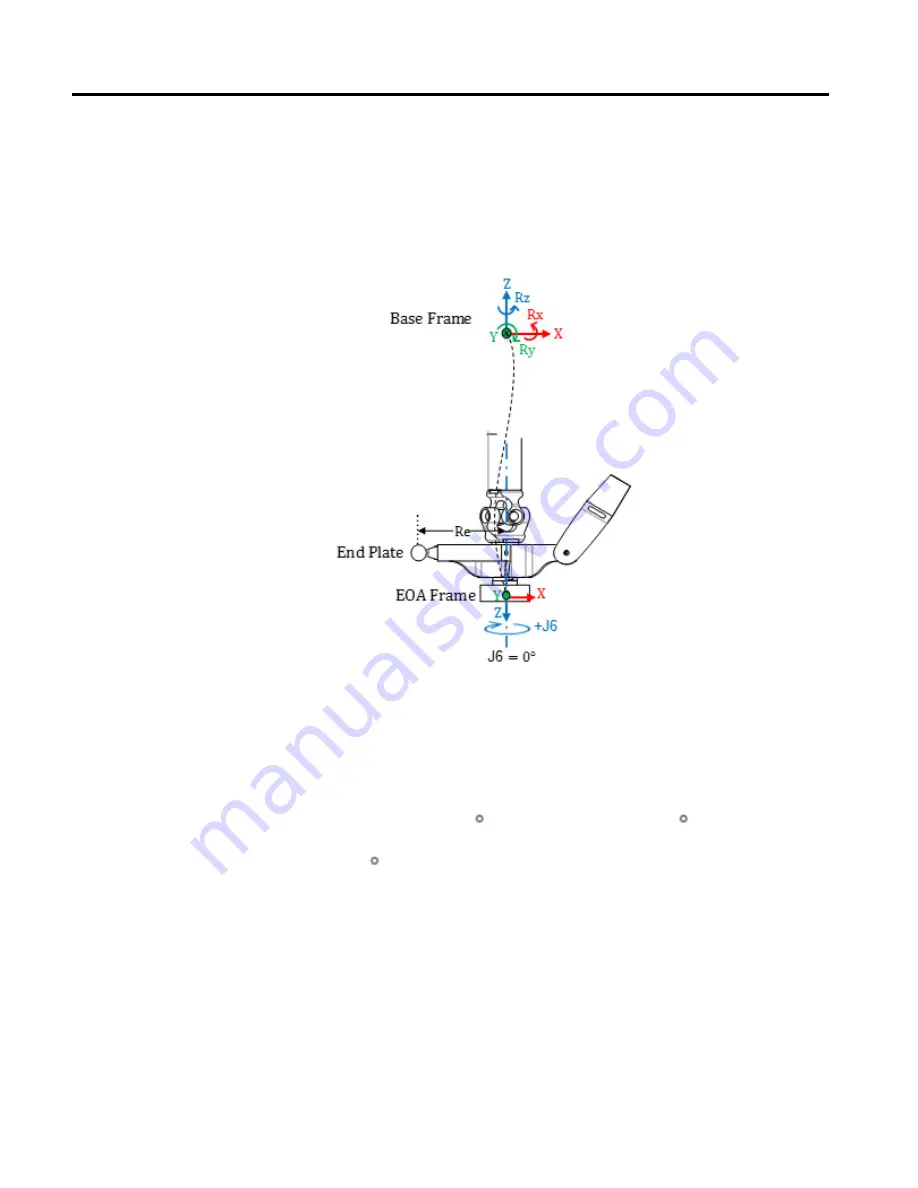
shows the details of a Delta J1J2J3J6 robot with the base Cartesian coordinate
system and four joint axes, which form the non-Cartesian coordinate system.
Cartesian and joint target points for Delta J1J2J3J6 robot system
A point in space may be described in two different ways; as a set of Cartesian
coordinates (Euclidean space) and as a set of robot joint angles (joint space).
Since there is no rotation on Rx and Ry Orientation axis, only program the Rx
orientation value to 180 . The Ry orientation is always 0 , and program the Rz
orientation values within fixed XYZ Euler Angle range of Rz, that is, within
+/-180 .
Joint axes for J1, J2 and J3 are typically configured as linear axis with over-travel
limits. The J6 joint axis is also typically configured as a linear axis with over-travel
limits.