




























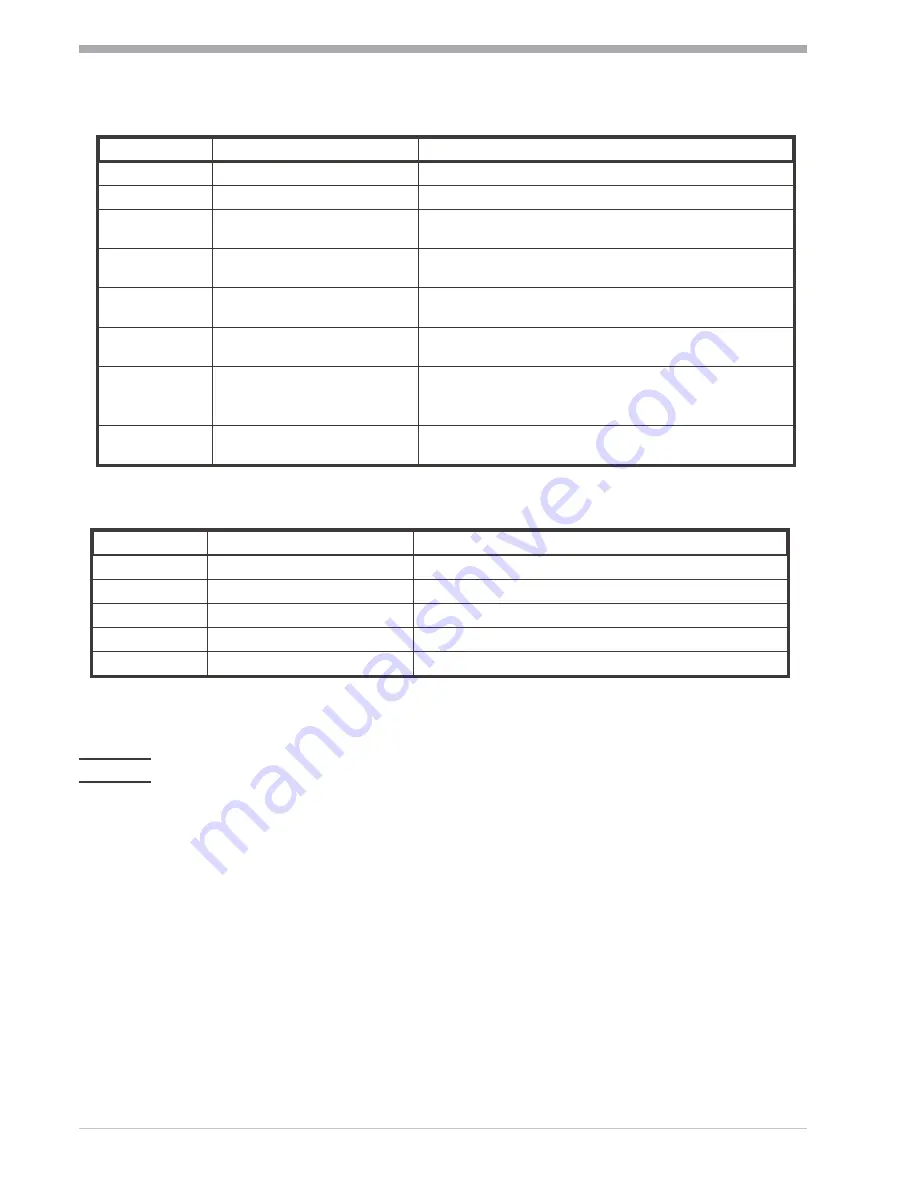
Self-tuning heating (
ADA.H
) and cooling (
ADA.C
) error status:
DAC function (
DAC
) error status:
3.5
Self-tuning
After starting by the operator, the controller makes a self-tuning attempt. The
controller uses the process characteristics for quick line-out to the set-point
without overshoot.
g
Self-tuning start can be locked via BlueControl (engineering tool) (
P.Loc
).
g
ti
and
td
are taken into account only, if they were
≠
OFF
previously.
Operation
Self-tuning
14
Operating manual MIR-491
Error status
Description
Behaviour
0
No error
3
Faulty control action
Re-configure controller (inverse
i
direct)
4
No response of process
variable
The control loop is perhaps not closed: check sensor,
connections and process
5
Low reversal point
Increase (
ADA.H
) max. output limiting
Y.Hi
or
decrease (
ADA.C
) min. output limiting
Y.Lo
6
Danger of exceeded set-point
(parameter determined)
If necessary, increase (inverse) or reduce (direct) set-point
7
Output step change too small
(dy > 5%)
Increase (
ADA.H
) max. output limiting
Y.Hi
or reduce
(
ADA.C
) min. output limiting
Y.Lo
8
Set-point reserve too small
Increase set-point (invers), reduce set-point (direct)
or increase set-point range
(
r
PArA
/
SEtp
/
SP.LO
and
SP.Hi
)
9
Impulse tuning failed
The control loop is perhaps not closed: check sensor,
connections and process
Error status
Description
Behaviour
0
No error
3
Output is blocked
Check the drive for blockage
4
Wrong method of operation
Wrong phasing, defect motor capacitor
5
Fail at Yp measurement
Check the connection to the Yp input
6
Calibration error
Manual calibration necessary
Содержание MIR-491
Страница 70: ...12 Notes Notes 70 Operating manual MIR 491...
Страница 71: ...Notes Operating manual MIR 491 71...
Страница 72: ...Notes 72 Operating manual MIR 491...
Страница 73: ...Notes Operating manual MIR 491 73...







































































