





























4 Repair
4.7.2. Replacement gearbox axis 2
3HAC026876-001 Revision: C
356
© Copyri
ght
200
6-2008 ABB.
All rights reserved.
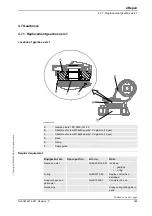
5. Fit the lifting tool on the upper and lower arms
as shown in the figure to the right.
Secure the robot in an overhead crane.
xx0700000350
Parts:
•
A: Lifting eye (on armhouse)
•
B: Lifting chain
•
C: Hoisting block
•
D: Lifting chain
•
E: Lifting chain
•
F: Roundsling (put in a loop
around the wrist on the inside)
•
G: Roundsling (put in a loop
around the lower arm)
6. Remove the lower end of the cable harness.
NOTE!
For Cleanroom robots the procedure is detailed
in section
.
cable harness, axes 1-6 on page 193
.
7. Let the removed part of the cable harness hang
lose, without it getting damaged when removal
is proceeded.
8. Remove the attachment screws M16x60 (12
pcs) securing the lower arm to gearbox axis 2.
Shown in the figure
9. Remove the upper and lower arms and let them
hang lifted while removing the gearbox from the
frame.
10. Remove the attachment screws M12x80 (16
pcs) securing the gearbox to the frame.
Shown in the figure
11. Remove motor axis 2.
12. Fit two guide pins in two of the holes, parallel to
each other.
Action
Note
Continued
Continues on next page
Содержание IRB 6640 - 130/3.2
Страница 2: ......
Страница 14: ...How to read the product manual 3HAC026876 001 Revision C 12 Copyright 2006 2008 ABB All rights reserved ...
Страница 439: ......
Страница 442: ......
Страница 443: ...ABB Robotics S 721 68 VÄSTERÅS SWEDEN Telephone 46 0 21 344000 Telefax 46 0 21 132592 3HAC026876 001 Revision C en ...






























































