





























Installing the movable mechanical stops
Use this procedure to fit the additional mechanical stops. An assembly drawing is
also enclosed with the product.
Note
Action
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the safeguarded
space.
1
See
Location of the mechanical stops on
Use the additional mechanical stop as a
template and drill fastening holes with dimen-
sion M12 at the base.
2
Tightening torque: 60 Nm.
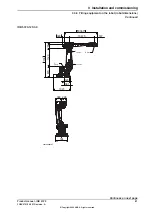
Fit the additional mechanical stop according
to the figure
.
Note
Install the washer with the chamfer turned
downwards.
A
A
xx2100000974
3
The system parameters that must be
changed (
Upper joint bound
and
Lower
joint bound
) are described in
Technical
reference manual - System parameters
.
Adjust the software working range limitations
(system parameter configuration) to corres-
pond to the mechanical limitations.
4
DANGER
Make sure all safety requirements are met
when performing the first test run.
5
94
Product manual - IRB 5720
3HAC079195-001 Revision: A
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.4.2 Installing movable mechanical stops on axis 1 (option 3323-1)
Continued
Содержание IRB 5710
Страница 1: ...ROBOTICS Product manual IRB 5720 ...
Страница 2: ...Trace back information Workspace 22A version a18 Checked in 2022 03 17 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 14: ...This page is intentionally left blank ...
Страница 36: ...This page is intentionally left blank ...
Страница 186: ...This page is intentionally left blank ...
Страница 580: ...This page is intentionally left blank ...
Страница 604: ...This page is intentionally left blank ...
Страница 609: ......





















































