





























Mounting angles and values
The parameter
Gravity Beta
(or
Gravity Alpha
) specifies the mounting angle of the
robot in radians. It is calculated in the following way.
Gravity Beta = A° x 3.141593/180 = B radians
, where
A
is the mounting
angle in degrees and
B
is the mounting angle in radians.
Gravity Beta
Mounting angle (A°)
Example of position
0.000000 (Default)
0°
Floor mounted
Corresponds to:
Example:
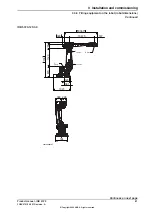
Tilted mounting
0.261799 rad
15°
3.141593
180°
Inverted mounting
Defining the system parameters in RobotWare
The value of the system parameters that define the mounting angle must be
redefined when changing the mounting angle of the robot. The parameters belong
to the type
Robot
, in the topic
Motion
.
The system parameters are described in
Technical reference manual - System
parameters
.
The system parameters are configured in RobotStudio or on the FlexPendant.
78
Product manual - IRB 5720
3HAC079195-001 Revision: A
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.6 Setting the system parameters for an inverted or a tilted robot
Continued
Содержание IRB 5710
Страница 1: ...ROBOTICS Product manual IRB 5720 ...
Страница 2: ...Trace back information Workspace 22A version a18 Checked in 2022 03 17 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 14: ...This page is intentionally left blank ...
Страница 36: ...This page is intentionally left blank ...
Страница 186: ...This page is intentionally left blank ...
Страница 580: ...This page is intentionally left blank ...
Страница 604: ...This page is intentionally left blank ...
Страница 609: ......





















































