



















7 Spare parts and exploded views
7.6. Spare parts - drive unit, IRB 2400/L
193
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
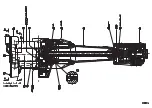
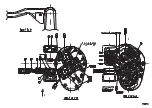
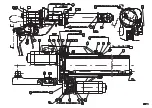
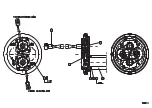
7.6. Spare parts - drive unit, IRB 2400/L
Drive unit, IRB 2400/L, spare part list
The spare parts for the drive unit, IRB 2400 /L, are listed below and shown in the foldout 10.
Item
Qty
Description
Spare part no. Dimension/Note
1
1
Drive shaft unit, axes 5-6
3HAC11804-1
Recommended spare
part. Replacement is
detailed in section
Replacement of drive
shaft unit, IRB 2400L on
page 154
2
2
Motor unit axes 5-6
(Recommended spare part.
Replacement is detailed in
section
motors, axes 4-6, IRB 2400L
on page 137
.)
3HAC11865-1
(Elmo)
3HAC021741-
001
(Yaskawa)
2
2
Motor unit axis 5-6
Recommended spare part
3HAC031020-
001
Cleanroom
(Yaskawa)
3
1
Motor plate
3HAA2504-1
4
8
Hexagon nut
9ADA267-5
M5 8.A2F
5
10
Hex socket head cap screw
3HAB3402-14
M5x16 8.8 Gleitmo 610
6
10
Plain washer
9ADA312-5
5.3x10x1. A2F
7
2
Gear belt
3HAA2393-1
Recommended spare
part. Replacement is
detailed in
Содержание IRB 2400/L
Страница 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Страница 16: ...Product documentation M2004 3HAC022031 001 Revision C 14 Copyright 2004 2008 ABB All rights reserved ...
Страница 191: ......
Страница 192: ......
Страница 193: ......
Страница 194: ......
Страница 195: ......
Страница 198: ......
Страница 199: ......
Страница 202: ......
Страница 203: ......
Страница 205: ......
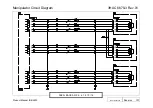
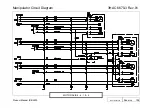
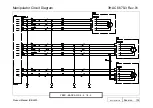
Страница 210: ...8 Circuit diagram 8 1 Introduction 3HAC022031 001 Revision C 198 Copyright 2004 2008 ABB All rights reserved Continued ...
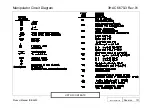
Страница 211: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 101 LIST OF CONTENTS ...
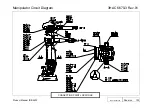
Страница 214: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 104 MOTOR AXIS 1 3 ...
Страница 226: ......

































































