


























2 Installation and commissioning
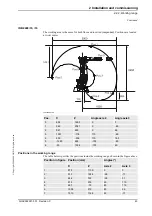
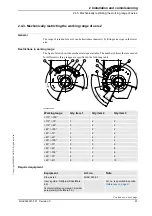
2.4.2. Mechanically restricting the working range of axis 1
55
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
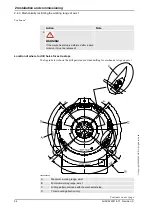
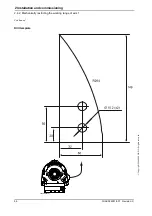
Hidden stiffening ribs and forbidden drilling sector
xx0600002647
*
The minimum and maximum measurement between the mechanical stops. The
difference between the measurement and the minimum and maximum working
range is 2 x 4º, which corresponds to the width of the stop pin (at the frame).
C
Drilling not allowed inside this sector!
D
Center lines for the hidden stiffening ribs
Continued
Continues on next page
Содержание IRB 2400/L
Страница 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Страница 16: ...Product documentation M2004 3HAC022031 001 Revision C 14 Copyright 2004 2008 ABB All rights reserved ...
Страница 191: ......
Страница 192: ......
Страница 193: ......
Страница 194: ......
Страница 195: ......
Страница 198: ......
Страница 199: ......
Страница 202: ......
Страница 203: ......
Страница 205: ......
Страница 210: ...8 Circuit diagram 8 1 Introduction 3HAC022031 001 Revision C 198 Copyright 2004 2008 ABB All rights reserved Continued ...
Страница 211: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 101 LIST OF CONTENTS ...
Страница 214: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 104 MOTOR AXIS 1 3 ...
Страница 226: ......







































































