





























4 Repair
4.3.2. Replacement of cable harness, axes 4-6
3HAC022031-001 Revision: C
90
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
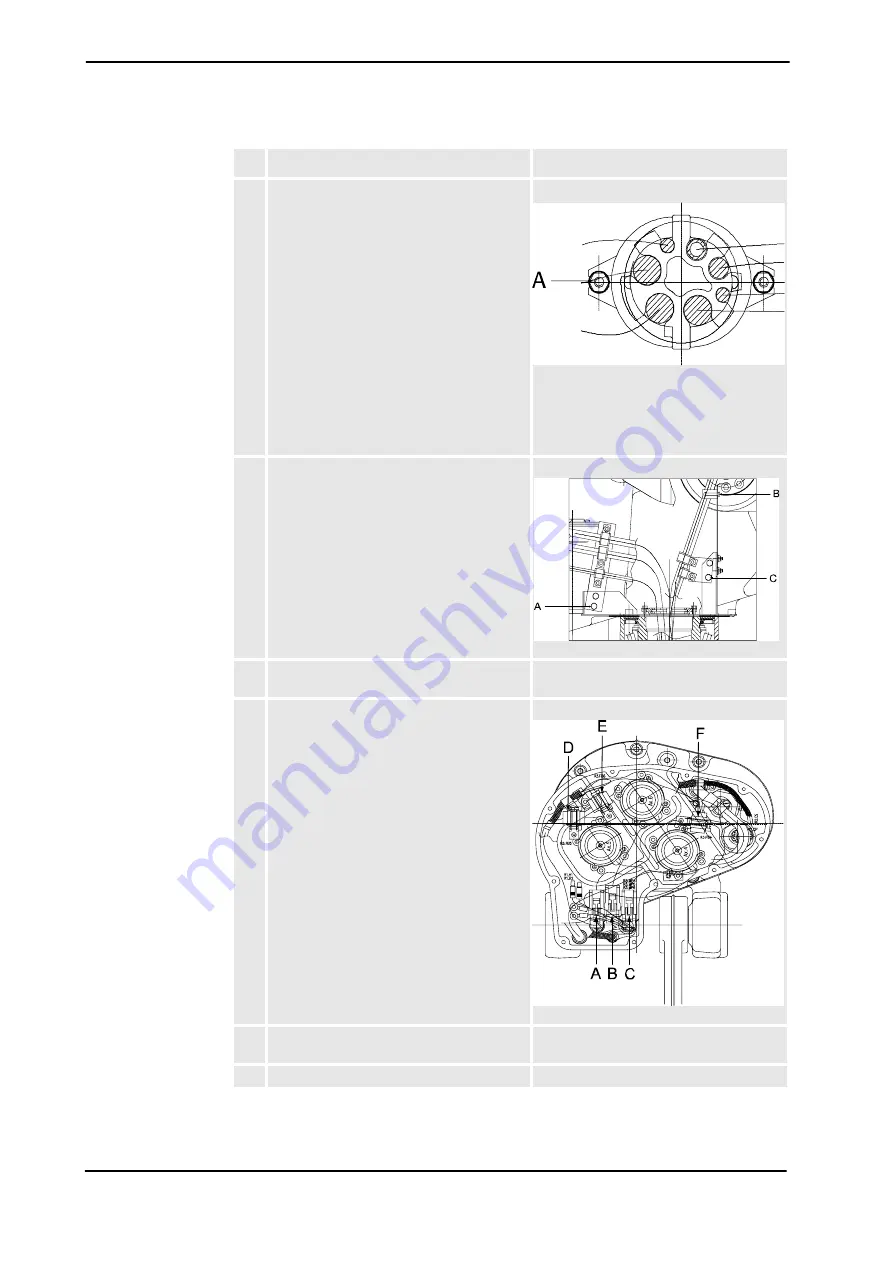
9. Remove the adapter plate from the harness
by removing its two attachment screws (A).
xx0200000404
Note! Different robot versions are fitted
with different plate versions. Make sure
the correct one is used to avoid cable
failure.
10. Remove the upper bracket securing the
cables to the arm house by unscrewing its
two attachment screws (C).
Cut the strip clamp (B).
xx0200000405
11. Remove the back cover of the motors 4-6,
fitted with torx screw.
12. Disconnect all connectors at motor 4, 5 and
motor 6, R3.MP4-6 and R3.FB4-6:
A - R3.MP5
B - R3.MP6
C - R3.MP4
D - R3.FB5
E - R3.FB6
F - R3.FB4
xx0200000406
13. Remove all screws holding the motor case
on motor 4-6.
14. Gently pull the cable harness out.
Action
Note/Illustration
Continued
Continues on next page
Содержание IRB 2400/L
Страница 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Страница 16: ...Product documentation M2004 3HAC022031 001 Revision C 14 Copyright 2004 2008 ABB All rights reserved ...
Страница 191: ......
Страница 192: ......
Страница 193: ......
Страница 194: ......
Страница 195: ......
Страница 198: ......
Страница 199: ......
Страница 202: ......
Страница 203: ......
Страница 205: ......
Страница 210: ...8 Circuit diagram 8 1 Introduction 3HAC022031 001 Revision C 198 Copyright 2004 2008 ABB All rights reserved Continued ...
Страница 211: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 101 LIST OF CONTENTS ...
Страница 214: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 104 MOTOR AXIS 1 3 ...
Страница 226: ......